PT.1: ABSTRACT
The goal of this project was to design, build, and test a vehicle capable of moving across terrain similar to Callisto’s, which is covered in craters and rocky ground. Such surfaces make traction, stability, and efficient movement particularly challenging.
Our final design was a dual-motor tracked vehicle, with each track powered by its own motor. This configuration provided better grip and stability on rough terrain, although the vehicle was not designed for high speed.
We tested the vehicle on a rocky surface, making it Callisto-like conditions. During the test, we measured how stable it was, how far it could travel, and how efficiently it used battery power.
PT.2: PROTOTYPE DESIGN
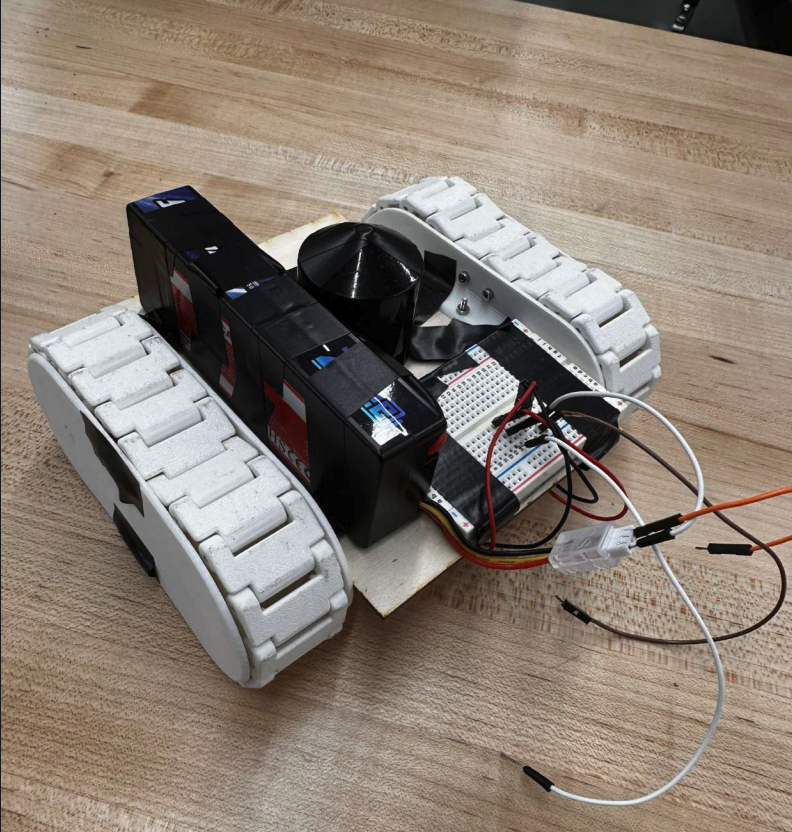
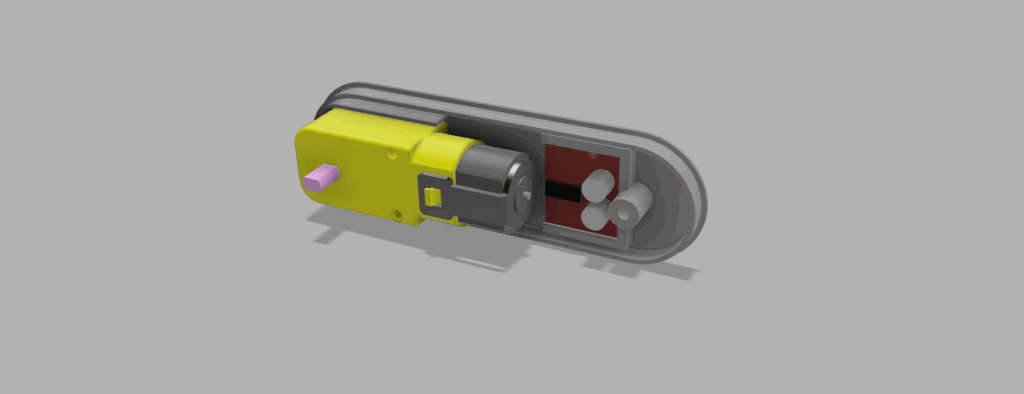
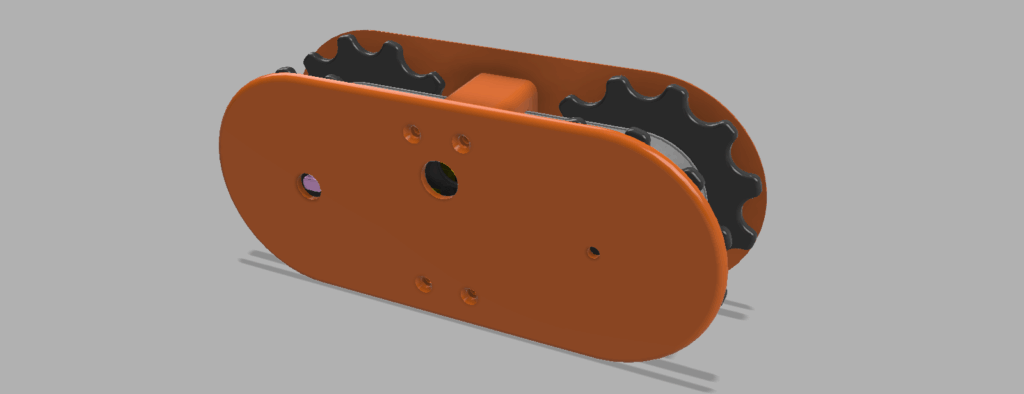
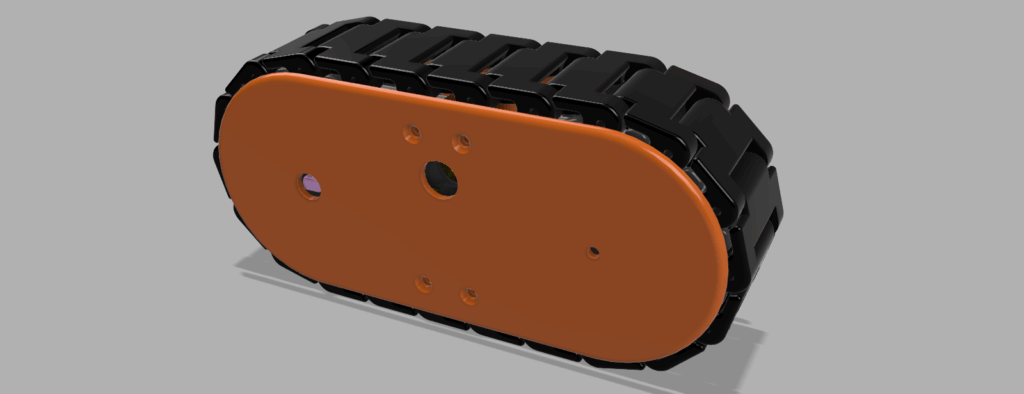
The final vehicle was a dual-motor tracked design, with one motor powering each track. This configuration was chosen to improve traction and stability on uneven, rocky terrain. The tracks increased ground contact compared to wheels, helping the vehicle move more reliably across rough surfaces.
The battery and breadboard were taped on top of the chassis for accessibility and ease of wiring. During early testing, this placement caused stability issues due to uneven weight distribution. To address this issue, additional mass was added and repositioned to better center the vehicle’s weight. This adjustment reduced tipping and improved overall stability during testing.
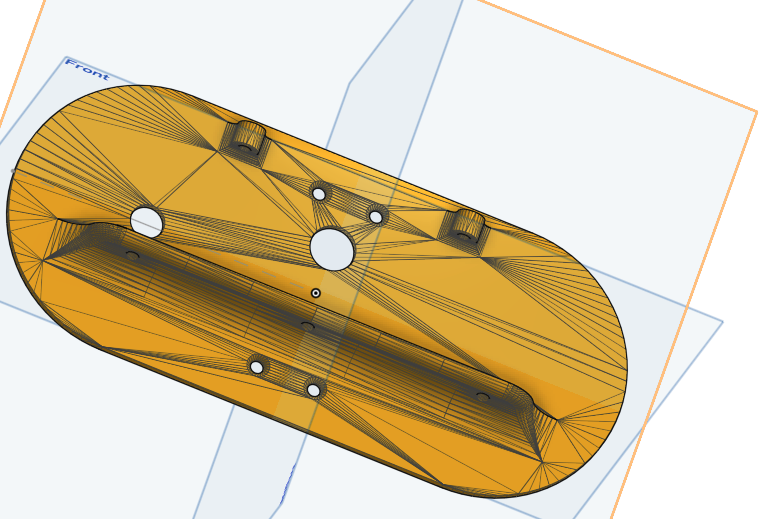
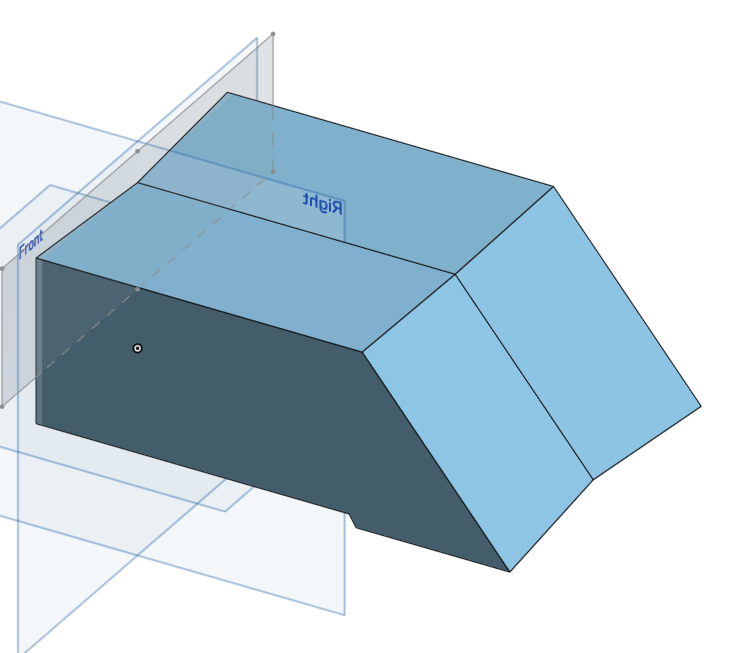
The prototype was built using a combination of CAD design, 3D-printed components, and available classroom materials
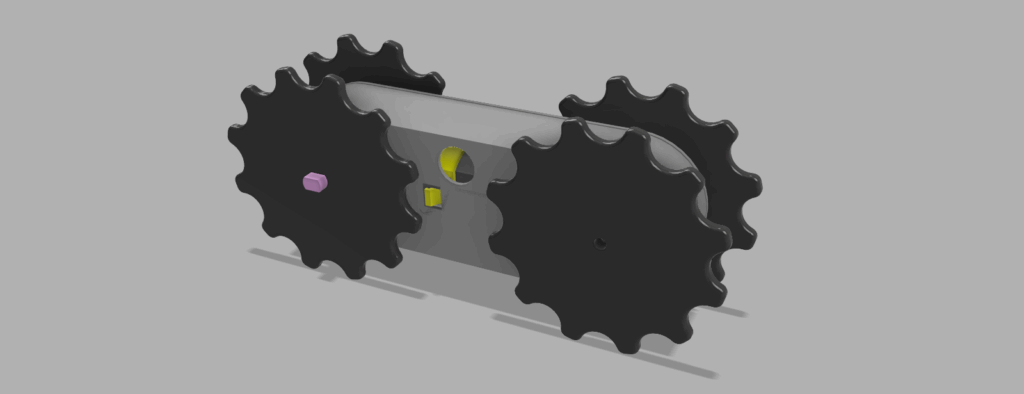
21 segments per motor connected by a metal axle.
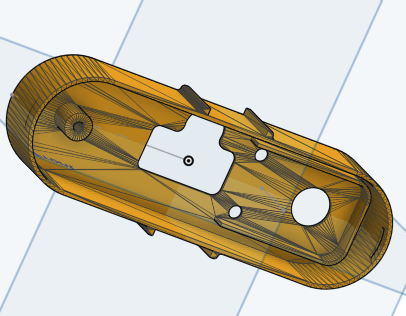
The inner & outer track guards of the track, connecting to motor and prevent track from falling out.
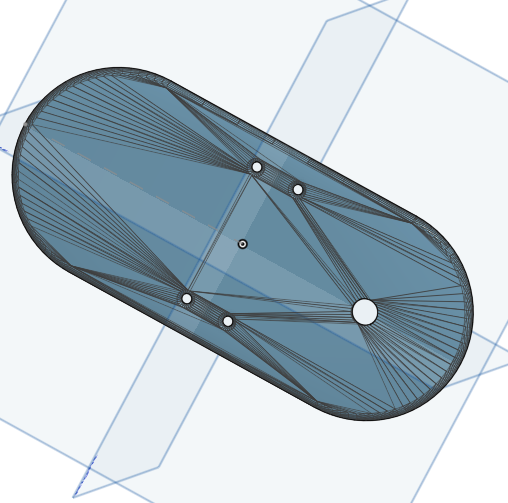
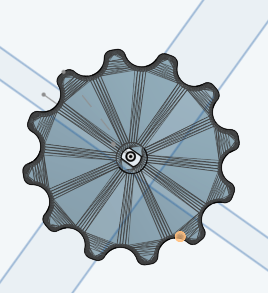
The gear of the track, it connects the track on each side, making sure they run smoothly. Placed inside the track guards.
Secured the motors tightly to prevent movement or vibration.
Assembly:
Although a CAD-designed chassis was created, time constraints meant the first test used a temporary wooden board chassis. Motors and tracks were mounted directly using screws, allowing testing while maintaining design plans.
The vehicle did not use any programming or control system. Once powered on, both motors ran continuously at the same input voltage, causing the vehicle to move forward automatically without steering or user control.
PT.3: SETUP & TESTING
Testing was conducted on gravel surfaces to simulate rough terrain similar to the surface of Callisto. Three test runs were recorded prior to the official test day on a gravel road behind the field house, and two additional test runs were recorded on the official test day using a class-prepared gravel setup.
Three runs on a gravel road behind the field house. The vehicle moved relatively straight, with minor turning. These trials demonstrated that the tracked design could reliably navigate limited obstacles.
Video 1, Video 2 & Video 3: Pre-Test Day Trials:
https://drive.google.com/drive/folders/12JbiUa6gIkjcTSLkZWJQQ0FrV884N7K9
https://drive.google.com/drive/folders/12JbiUa6gIkjcTSLkZWJQQ0FrV884N7K9
https://drive.google.com/drive/folders/12JbiUa6gIkjcTSLkZWJQQ0FrV884N7K9
Two runs on a class-prepared gravel surface with more rocks and uneven sections. The vehicle showed a significantly greater leftward turn during motion. Unequal traction between tracks, combined with uneven weight distribution, contributed to this drift. [clarified and removed repetitive phrasing]
Video 4 & Video 5: Official Test Day Trials:
https://drive.google.com/drive/folders/12JbiUa6gIkjcTSLkZWJQQ0FrV884N7K9
https://drive.google.com/drive/folders/12JbiUa6gIkjcTSLkZWJQQ0FrV884N7K9
Across all trials, the vehicle operated autonomously and remained stable without tipping over. The differences observed between the pre-test and test-day trials demonstrate how changes in surface conditions can significantly influence vehicle performance and movement accuracy.
PT.4: RESULTS & ANALYSIS
Test results:
During testing, electrical measurements were recorded to estimate the vehicle’s energy input. The battery voltage remained stable at approximately 7.5 V while the vehicle was running. A current reading of 0.75 A was measured briefly in series with the motors. The wire used for this measurement melted shortly afterward due to the high current, so further measurements were not possible. Because motors typically draw more current on rough terrain, the actual electrical power input during outdoor tests was likely equal to or greater than this value.
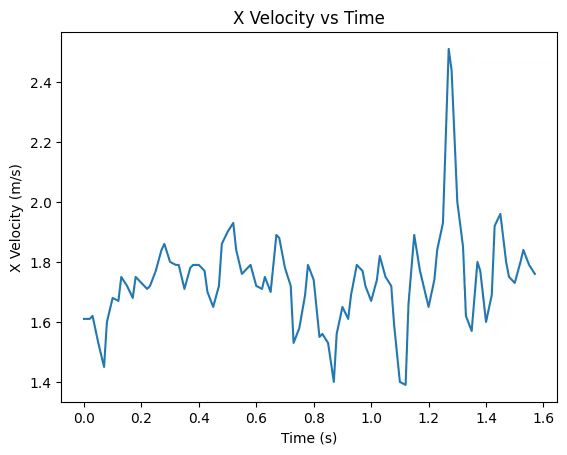
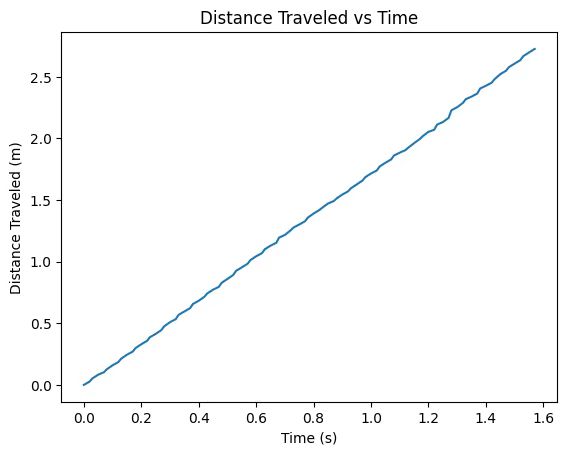
The vehicle traveled approximately 2.76 m, determined using frame-by-frame video analysis. Indoor tests on a flat, obstacle-free surface allowed the vehicle to move nearly perfectly straight over this distance. The indoor test duration was 1.57 s, giving an average speed of approximately 1.76 m/s.
Outdoor tests on gravel showed a reduced average speed of approximately 0.40 m/s, highlighting the impact of surface roughness on motion efficiency.
Using these measurements, the electrical power input to the vehicle was calculated using the formula:
P=V×I
P=7.5×0.75=5.625W
This power input value was used consistently for both flat and rocky surface efficiency estimates, since accurate current measurements under load were not possible.
Efficiency calculation (flat surface):
Video used for analysis:
https://drive.google.com/drive/folders/12JbiUa6gIkjcTSLkZWJQQ0FrV884N7K9
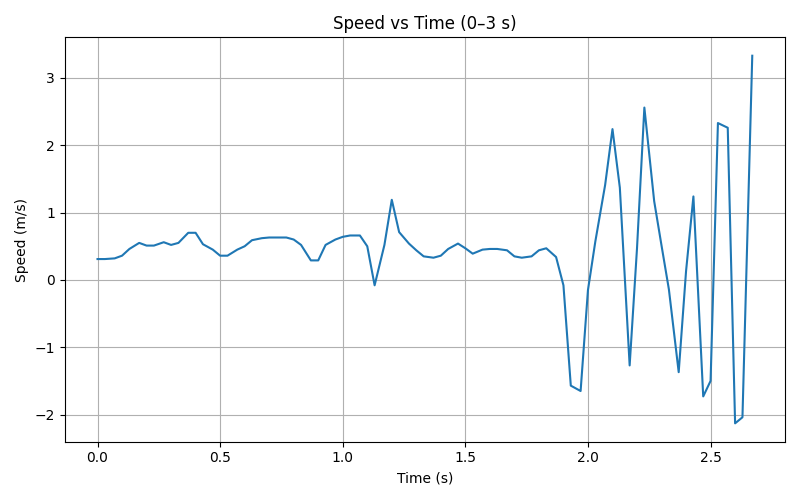
Speed vs time graph
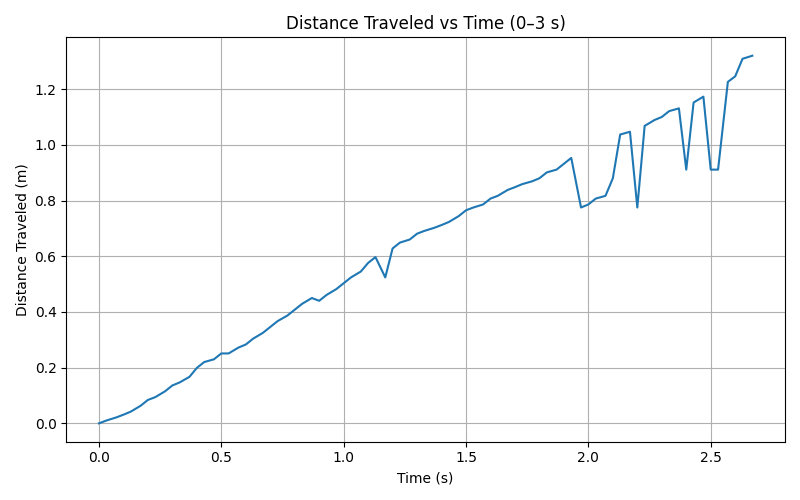
Distance (X-Position) vs Time graph
Mass: m=1.1849 kg
Average speed: Vavg≈1.76m/s
Electrical power input: Pin=5.625W
Test duration: t=3s
Mechanical energy output:
Eout==0.5×1.1849×(1.76)²≈1.835J
Total input energy:
Ein=5.625×3=16.875J
Efficiency:
Efficiency: (1.835 / 16.875) × 100 ≈ 10.9%
Efficiency calculation (rocky surface):
Speed vs Time graph
Distance (X-Position) vs Time graph
Video used for analysis:
https://drive.google.com/file/d/18VIEOl-ovop75YhsUAK9rtJ7R12ZKWf6/view?usp=sharing
Mass: m=1.1849 kg
Average speed: Vavg≈1.67m/s
Electrical power input: Pin=5.625 W
Test duration: t=3s
Mechanical energy output:
Eout=0.5 × 1.1849 × (1.67)² ≈ 1.65 J
Total input energy:
Ein=5.625×3.0≈16.875J
Efficiency:
Efficiency: (1.68 / 16.875) × 100 %≈ 9.8%
Analysis:
Indoor tests provided a baseline for the vehicle’s performance under ideal conditions, while outdoor tests demonstrated how uneven terrain significantly reduces speed and efficiency. The consistent leftward drift observed outdoors highlights the importance of precise weight distribution and equal traction between tracks.
While kinetic energy was used as a simplified measure of mechanical output, this model does not account for energy lost to rolling resistance or deformation, meaning the calculated efficiencies represent upper-bound estimates.
PT.5: CHANGES TO BE MADE
Conclusion:
The dual-motor tracked vehicle can move on its own across rough terrain and provides basic stability and traction. However, its performance is very sensitive to weight distribution, surface conditions, and friction. In outdoor tests, the vehicle tended to drift left and had some trouble on uneven sections, while indoor tests gave a more accurate measure of its speed. Efficiency calculations show that only about 10% of the electrical energy was actually converted into mechanical motion, with most of the rest lost to friction, slippage, and vibration.
Based on these observations, several design changes could improve performance:
Weight distribution: Reposition the battery and any added weight to balance the chassis and reduce leftward drift.
Tracks: Add rubber strips to improve traction on rough surfaces. Ensure track tension is adjustable to prevent slipping or derailing.
Chassis: Build a proper chassis instead of using a wooden board to improve stability and durability.
Suspension: Add a basic suspension system to help all tracks maintain contact with uneven terrain.
Electrical system: Use thicker wires and secure connections to handle the current drawn by the dual motors safely.
Implications for Real-Life Use:
The vehicle works well on mostly flat or gently uneven surfaces, but its performance is highly affected by weight balance, friction, and the type of terrain. On rough or unpredictable surfaces, it may drift, slip, or stall unless the weight and track contact are optimized. Efficiency will generally be lower on rough surfaces, because more energy is lost to friction and slippage.
Takeaway:
To make the vehicle reliable in real-life conditions, it would need better weight balance, stronger track grip (like rubber inserts), and perhaps a simple suspension system. The electrical connections should also be reinforced to handle sustained current safely. With these adjustments, the vehicle could move across uneven terrain much more consistently while staying stable and efficient.
Leave a Reply to Ms. Holmen Cancel reply