Abstract
- Purpose: What are we trying to achieve?
- Clear Direction in Relation to Purpose
- What are we trying to address?
The Planetary Exploration Project is an opportunity for students to present a self-designed vehicle suitable for travel on exoplanets. Our group was assigned the exoplanet Teegarden’s Star B. Due to the rocky terrain and uneven climate, it was our goal to develop a vehicle using tools such as TinkerCAD, Onshape, and code that can safely travel on the planet. Our initial definition statements were:
How might four human astronauts travel on the surface of Teegarden’s Star b in the most efficient and safe way possible?
Four human astronauts need a safe and efficient way to travel on the surface of Teegarden’s Star b because it is an unknown exoplanet which possesses a unique environment separate from Earth.
Feedback/Things to consider:
- Distance?
- Give enough information about the question without overcomplicating it
- The definition should be testable via the vehicle prototype (includes parameters etc)
- Relate constraints to safety and efficiency
- Make it less wordy, clearer, concise
After discussing as a group during class, and redefining a few criteria that needed to be met, this is our revised definition statement:
Four human astronauts need a safe and efficient way to travel 10 continuous km across Teegarden’s Star b due to unique atmospheric, gravitational, and geological conditions. We must overcome challenges (such as a differing gravitational pull, rocky terrain, and uncertain atmosphere) by creating a testing environment that models these conditions.
(Clarification: This work was produced by me, Tiger, and Hukam and can be seen in this document)
Initial Planning + Ideation
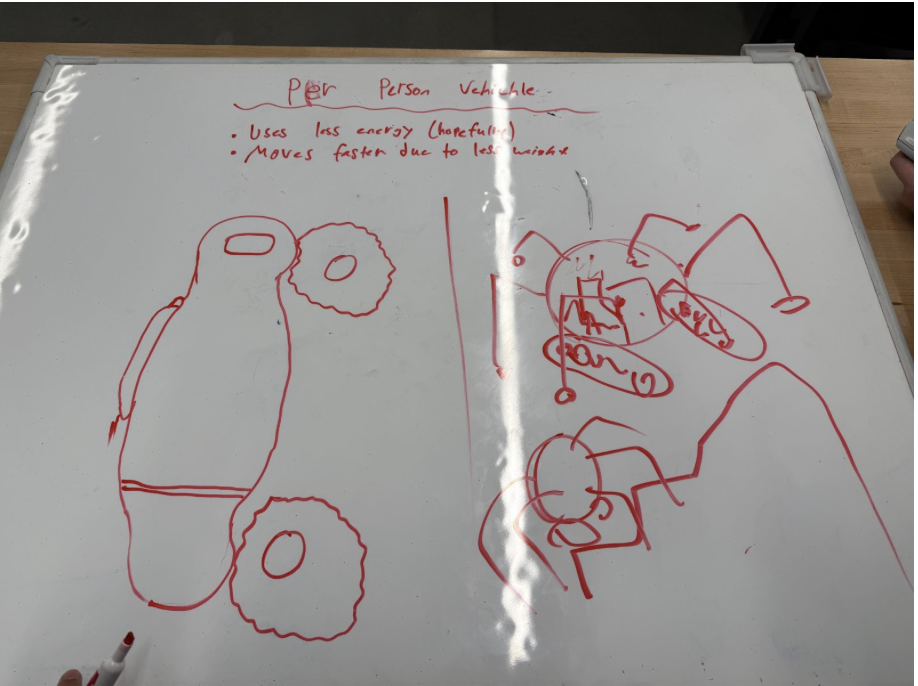
Initially, we worked to define a list of possible ideas that would address the task defined. This was an opportunity for us to simply brainstorm and take into consideration all the possible, multifaceted ways this problem could be addressed. Our works during this class can be seen here:
This was a planning board basically sketching out how we wanted the vehicle to look like (such as the wheels indicated on the left and the spider legs on the right)
Next, we eliminated all the ideas that would simply not be possible such as: No gas, No food or water, No engine etc. Now, having ruled out multiple ideas that would not be feasible, the ones that were left sounded like a decent idea. Therefore, our goal now was to choose or combine the remaining ideas that would be best suited for addressing the problem. First, we split the ideal model into several distinct concepts: Mobility, comfortability, and feasibility. Mobility: Can the vehicle move successfully across Teegarden’s Star B. Comfortability: Can 4 astronauts physically survive 10km in the vehicle on Teegarden’s Star B. Feasibility: Are we going to be able to model this vehicle as a prototype and simulate the conditions on the planet using available materials. Our initial idea was to define 4 or 2 vehicles where the astronauts would be split into groups of 2 or 1/vehicle; Our idea behind this was to decrease energy usage and increase speed without detriments.
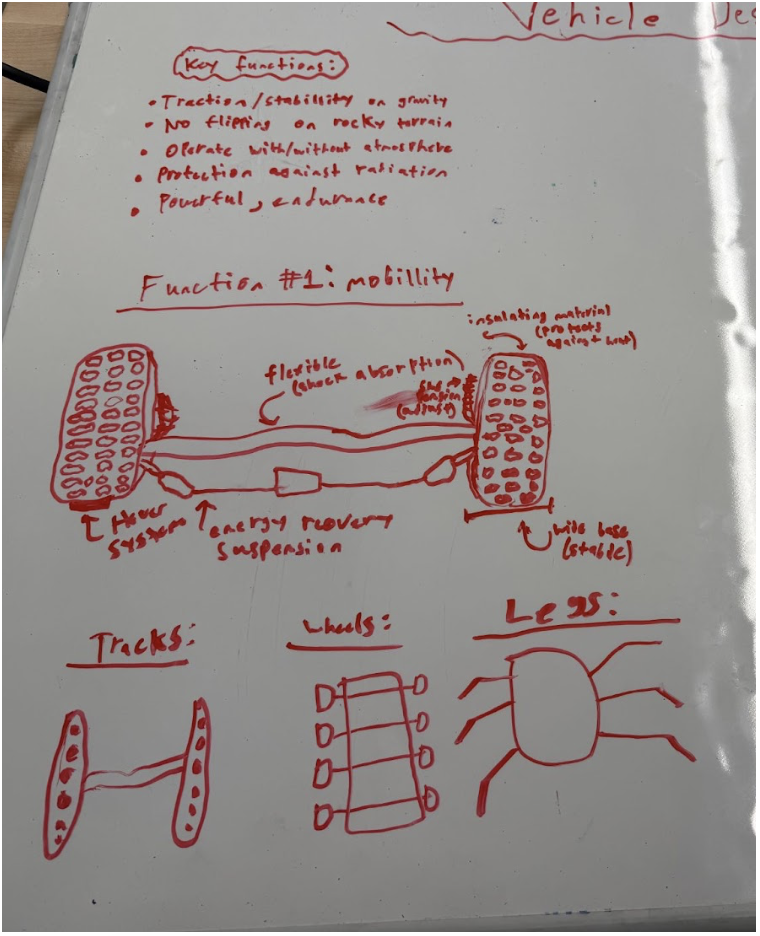
Second, we brainstormed what features the vehicle needed for it to be able to safely traverse the terrain on Teegarden’s Star B. A major part of this section was deciding what lower “body” parts the vehicle would possess. Ultimately, our goal was to have tracks, wheels, and spider-like legs that would rotate whenever needed. The key functions shown at the top of the board indicate the criteria we had to meet: Traction, stability on gravity; No flipping on rocky terrain; Operate with/without atmosphere; Protection against radiation; Powerful, endurance. Below are attempts of the portrayal of a hover system to help the spider legs and tracks from interchangeably switching depending on current terrain.
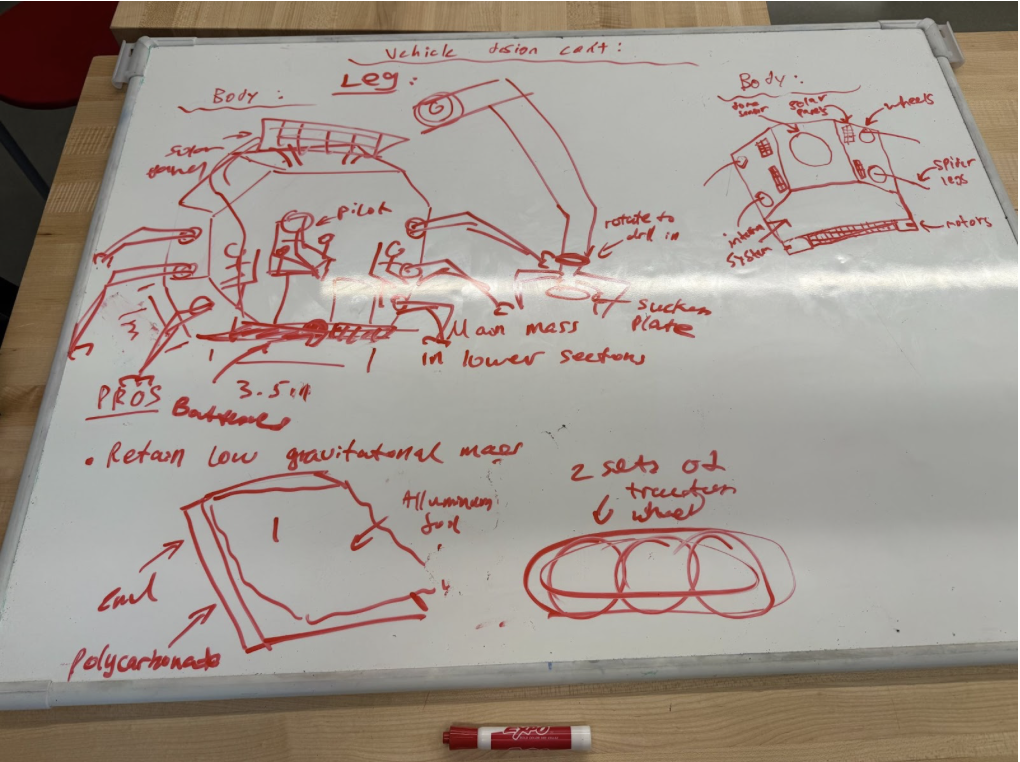
Third, we hypothesized what features the main body of the vehicle have to possess for it to be succinctly ready for the harsh environments on Teegarden’s Star B. We mapped out the exact dimensions of each part of the vehicle (body, leg etc) and visualized how it would work after connecting each part. At the bottom, we wrote down the pros and cons of each design discussed (retains low gravitational centre, less expensive, etc):
After all this was done, our group decided to make a coherent BOM list (included later in the blog post) so that both us and the teacher would have a general idea of the items needed to be ordered.
Continued Actions
Along with the CAD Design, I believed it was necessary to pair the vehicle with certain code. Although we did not end up using this code as Tiger had a pre-built vehicle (completed in Robotics) that utilized batteries and previously included code, this was my code (coded in Java using online.gbd):
Code
public class Rover {
public void run() {
while (true) {
String command = receiveCommand();
switch (command) {
case “MOVE_FORWARD”:
if (terrainIsSafe()) {
driveForward(0.1);
} else {
sendStatus(“Obstacle detected, cannot move”);
}
break;
case “TURN_LEFT”:
rotate(10);
break;
case “TAKE_PICTURE”:
Image img = cameraCapture();
sendImage(img);
break;
case “CHECK_STATUS”:
Status s = new Status(
batteryLevel(),
internalTemp(),
currentPosition()
);
sendStatus(s.toString());
break;
default:
sendStatus(“Unknown command”);
}
if (emergencyStopTriggered()) {
stopAllMotors();
sendStatus(“Emergency stop activated”);
}
}
}
private String receiveCommand() { return “”; }
private boolean terrainIsSafe() { return true; }
private void driveForward(double speed) {}
private void rotate(int degrees) {}
private Image cameraCapture() { return null; }
private void sendImage(Image img) {}
private void sendStatus(String msg) {}
private double batteryLevel() { return 0; }
private double internalTemp() { return 0; }
private String currentPosition() { return “”; }
private boolean emergencyStopTriggered() { return false; }
private void stopAllMotors() {}
private class Image {}
private class Status {
double battery;
double temp;
String pos;
Status(double b, double t, String p) {
battery = b; temp = t; pos = p;
}
public String toString() {
return “Battery: ” + battery +
“, Temp: ” + temp +
“, Position: ” + pos;
}
}
}
public class RoverHealthCheck {
private static final double MIN_BATTERY = 25.0;
private static final double MAX_TEMP = 85.0;
private static final double MIN_TEMP = -40.0;
public static void main(String[] args) {
while (true) {
checkSystems();
sleep(5000);
}
}
private static void checkSystems() {
double battery = Sensors.getBatteryLevel();
double temperature = Sensors.getInternalTemperature();
boolean comms = Sensors.communicationOnline();
if (battery < MIN_BATTERY) {
enterLowPowerMode();
}
if (temperature > MAX_TEMP || temperature < MIN_TEMP) {
shutdownNonEssentialSystems();
}
if (!comms) {
attemptReconnect();
}
logStatus(battery, temperature, comms);
}
private static void enterLowPowerMode() {
System.out.println(“WARNING: Low battery. Entering low power mode.”);
Systems.disable(“camera”);
Systems.disable(“drill”);
}
private static void shutdownNonEssentialSystems() {
System.out.println(“CRITICAL: Temperature out of range.”);
Systems.disableAllNonEssential();
}
private static void attemptReconnect() {
System.out.println(“WARNING: Communication lost. Reconnecting…”);
Communications.resetAntenna();
}
private static void logStatus(double b, double t, boolean c) {
System.out.println(
“Battery: ” + b + “% | Temp: ” + t + “C | Comms: ” + c
);
}
private static void sleep(int ms) {
try {
Thread.sleep(ms);
} catch (InterruptedException e) {
}
}
}
Videos of First Test
On the 18th of December, our group completed the first test of our vehicle using a meter stick, a wood surface and a stationary camera to record its movement. Artificial items were utilized in an attempt to simulate the authentic conditions on Teegarden’s Star B (Clay, rocks, paper). Our Test Motive was: To see if the vehicle works and if it can climb over obstructions.
Results:
Worked
- Most of the time, the car would drive forward, and the wheels would work.
- The car can stop really quickly by just turning the battery source off.
Problems
- The back left wheel does not touch the ground enough, and thus sometimes doesn’t spin, causing the vehicle to always turn left and crash.
- The vehicle has no way, at the moment, to climb any objects with height.
- There is no way to control the movement of the vehicle other than to turn it on and move forward
- When we used paper balls as objects, the wheels got stuck on them. (The friction of paper likely slowed the vehicle down)
- Sometimes the car just spins in a circle and doesn’t move. I noticed this was because the back left wheel was completely off the ground.
- I had to hold the battery pack and walk as the vehicle moved. We have no way of turning the vehicle on and off from a distance.
Possible Improvement
- Make the back left wheel taller by adding some cardboard or more foam to where it’s connected.
- We can get bigger front wheels to give the car a slant, which could maybe help it climb better.
- Add a way to make the vehicle climb mountains (Spider leg idea could work, but it’s very hard, we can discuss this issue later)
- Add a DC motor control to the car so then we can use a remote to control how the car moves from a distance.
Videos of Second Test
On the 23rd of January, our group completed the second and final test to assess the performance of our vehicle in simulated terrain similar to that of Teegarden’s Star B’s. Unfortunately, due to the massive amount of changes we decided to make to the vehicle (such as including a full suspension system, and using bluetooth to remotely control it), it did not function as we would have liked in the second test. In reality, it barely moved on the rough surface provided. However, we did get a measure of the voltage (0.99V) and this is analyzed in the “Testing results and efficiency”.
Goals for this Test: To finally assess whether or not our designed vehicle is suitable for traverse on Teegarden’s Star B
Outcomes: Vehicle did not move, failed test
What worked: Got a measure of voltage of 0.99V, indicating very low energy efficiency, which explains why the vehicle failed to move.
Testing Results and Efficiency
To analyze the electrical efficiency of the vehicle, we compared the voltage supplied by the batteries to the voltage effectively delivered to the motors during testing. Each alkaline AA battery provides approximately 1.5 V. Since four batteries were used in series, the total input voltage to the system is:
Equation 1:
During testing, the measured voltage delivered to each motor fluctuated between 0.6 V and 0.9 V. To account for this variation, the average motor voltage is calculated:
Equation 2:
Because the vehicle uses four motors operating simultaneously, the total effective output voltage delivered to the motors is:
Equation 3:
Energy efficiency is defined as the ratio of useful electrical output to the total electrical input. This relationship is expressed as:
Equation 4:
Substituting the calculated values:
Equation 5:
This series of calculations exemplify the low percentage of energy efficiency. This is likely due to the unnecessary complication and incorrect displacement of the wires inside the vehicle. Because of this low energy efficiency, the vehicle was not able to move and therefore was deemed “unworthy” of traversal on Teegarden’s Star B.
CAD Designs
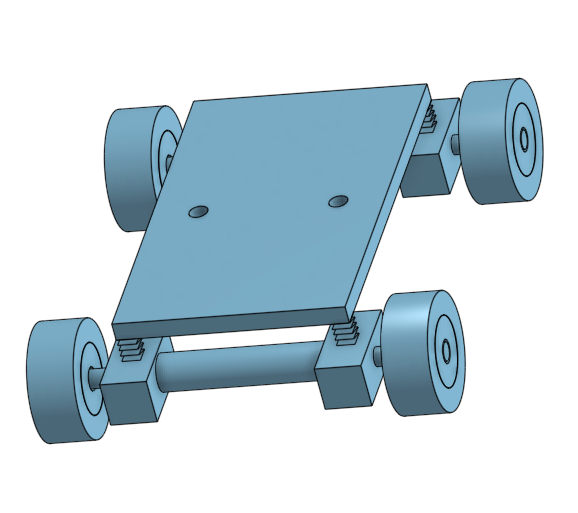
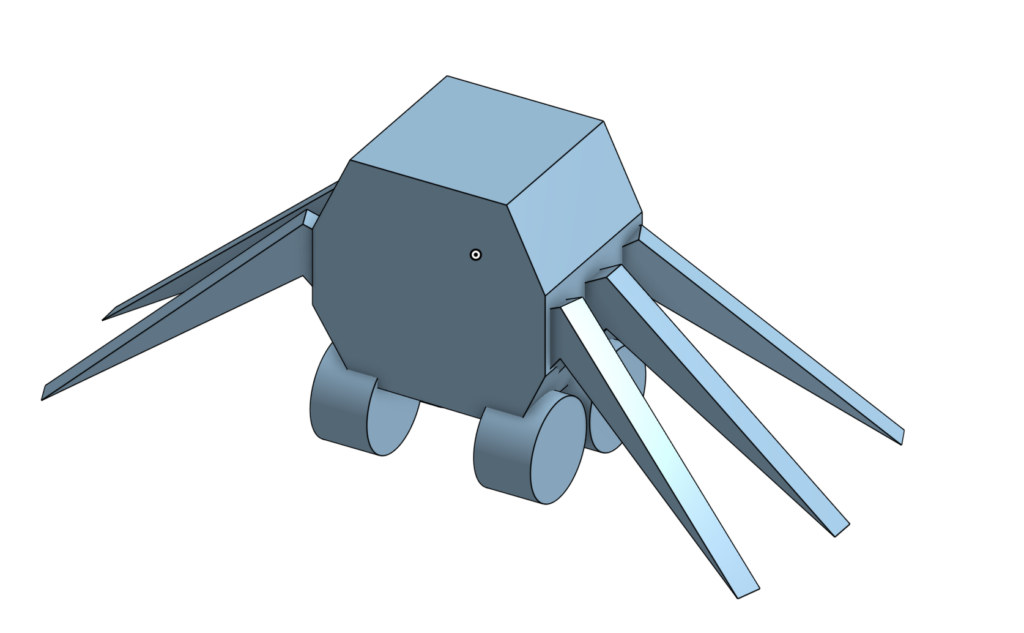
This is CAD design we decided to go with for testing
Vernier Analysis
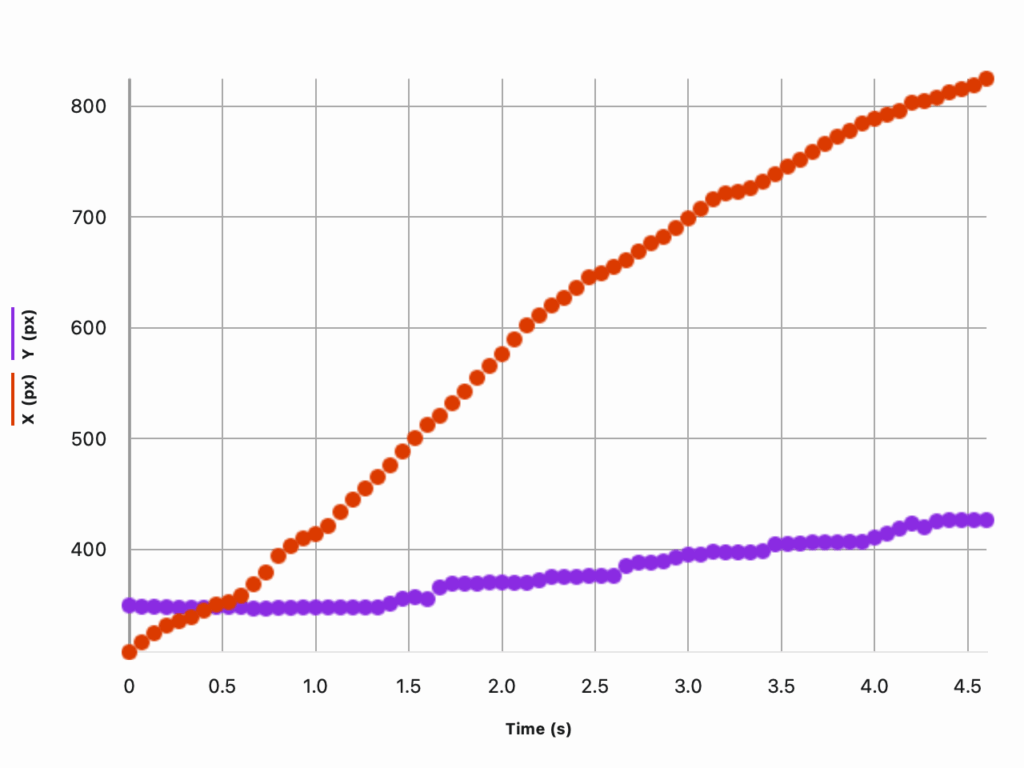
The Vernier Graph Analysis shows the position of the vehicle recorded in the video with respect to its x and y positions. In this analysis, the x-position increases steadily from approximately 320 px to 820px within 4.5 seconds, indicating that the vehicle was able to move forward relatively consistently across the test. This suggest that the drive motion was functional and that the vehicle was capable of moving forwards on relatively flat terrain.
In contrast, the y position shows only a small overall increase, rising gradually from around 350 px to approximately 430 px. This limited change indicates that the vehicle experienced minimal vertical displacement, meaning it struggled to climb or navigate elevation changes (the paper balls and the rock + clay presented as obstacles in the test). The relatively shallow slope of the y proponent of the graph supports the claim that the vehicle struggled to traverse over obstacles such as the clay rock, and the paper balls presented to emulate the mountains on Teegarden’s Star B.
BOM
Bill of Materials (BOM)
| Category | Component / Material | Quantity | Purpose / Justification |
|---|---|---|---|
| Structural | Foam board | 3 sheets | Used for the main chassis due to its lightweight nature and ease of cutting and shaping. |
| Structural | Wooden dowels | 6 | Provided structural reinforcement and axle support for wheels and legs. |
| Structural | HDPE plastic sheet | 1 | Used to simulate durable outer plating and improve rigidity. |
| Mobility | Rubber wheels | 4 | Allowed ground traction and forward motion on flat terrain. |
| Mobility | Rubber treads | 2 strips | Improved grip on uneven and sandy surfaces. |
| Mobility | Cardboard (terrain testing) | Multiple pieces | Used to simulate uneven terrain and elevation changes. |
| Electronics | DC motors | 2 | Converted electrical energy into mechanical motion for propulsion. |
| Electronics | Motor driver module | 1 | Controlled motor direction and speed. |
| Electronics | Battery pack (7.4 V) | 1 | Primary power source for the vehicle. |
| Electronics | Battery holder | 1 | Secured the battery and ensured stable electrical connections. |
| Electronics | HC-05 Bluetooth module | 1 | Enabled wireless communication for remote control. |
| Electronics | Arduino microcontroller | 1 | Acted as the control unit for motor operation and communication. |
| Wiring | Jumper wires | Multiple | Connected electrical components and circuits. |
| Testing & Simulation | Clay | Multiple blocks | Simulated large “mountains” and high-resistance terrain. |
| Testing & Simulation | Kinetic sand | 1 tray | Simulated loose planetary soil conditions. |
| Testing & Simulation | Foam rocks | Several | Simulated rocky obstacles. |
| Assembly | Hot glue | Several sticks | Used to assemble structural components quickly. |
| Assembly | Tape | 1 roll | Temporary mounting and reinforcement during testing. |
Evaluation
Overall, I believe the project was generally well planned and tested. However, there were several issues that if addressed, would have improved the outcome of the last test significantly. First, our initial idea of using spider legs to elevate the vehicle to traverse rocky terrain was extremely ambitious and in hindsight, a risky endeavour. Due to all the time our group spent on that idea, we did not allocate sufficient time to building the actual vehicle. Second, we should have definitely tested our prototype more often than the two “Test days” provided to us. This would have aided us to evaluate the current condition of the vehicle and areas it needs improvement in. Third, instead of telling a single person to a single task (Tiger — CAD + Robotics, Hukam — Documentation + CAD, Daniel — Code + Mathematical Computation), I think we should have combined the knowledge of all 3 people in our group on every task. This would have increased the contributions of all 3 people and everyone would be in unison of the final conclusions.
Realistic Travel Distance
Realistically, a vehicle with 50 percent efficiency would travel up to 1600km on an average gas of tank on earth. Although 50 percent efficiency is not disappointing at all, the main focus of the design project was to design a vehicle that is suitable for travel on the rugged terrain of Teegarden’s Star B. Therefore, although the vehicle will travel sufficiently far on land, it will struggle to navigate difficult terrain on an exoplanet with 50 percent efficiency. To ensure its stability and consistency on Teegarden’s Star B, I need to ensure that the gas tank it will run on will not leak or get impaired by the harsh environments on the exoplanet. I can achieve this by multiple rounds of testing on Earth with simulated environments to ensure the area where the gas tank will be located on the vehicle is safe and protected from environmental issues.
Leave a Reply to mcrompton Cancel reply