Intro
When designing a vehicle suitable for Titan, the critical problems we must consider are its ability to accommodate 4 people and its machinery under extreme temperatures of -180°C, hold sufficient energy to travel distances of 10km at a time, be able to produce oxygen, and have sufficient traction to grip Titan’s unique surface of ice, dunes and pebbles alongside combating the lower gravity similar to the moon.
Creating the Vehicle
To begin the design process for our vehicle, I was tasked with making a sketch, which was then further visualized with 3d modelling software. After a long period of working on the vehicle, we have managed to create a version that we can use to test. We went through a number of iterations, each with its own flaws.
When creating our first design, a human error during printing caused an important hole to be missing from the bottom of the design, as you can see in the images below. However, we believed we could salvage this body and attempt to continue building without this hole. It ended up failing due to the new positioning of the wheels not allowing them to touch the ground, since they were designed to fit in the old position.
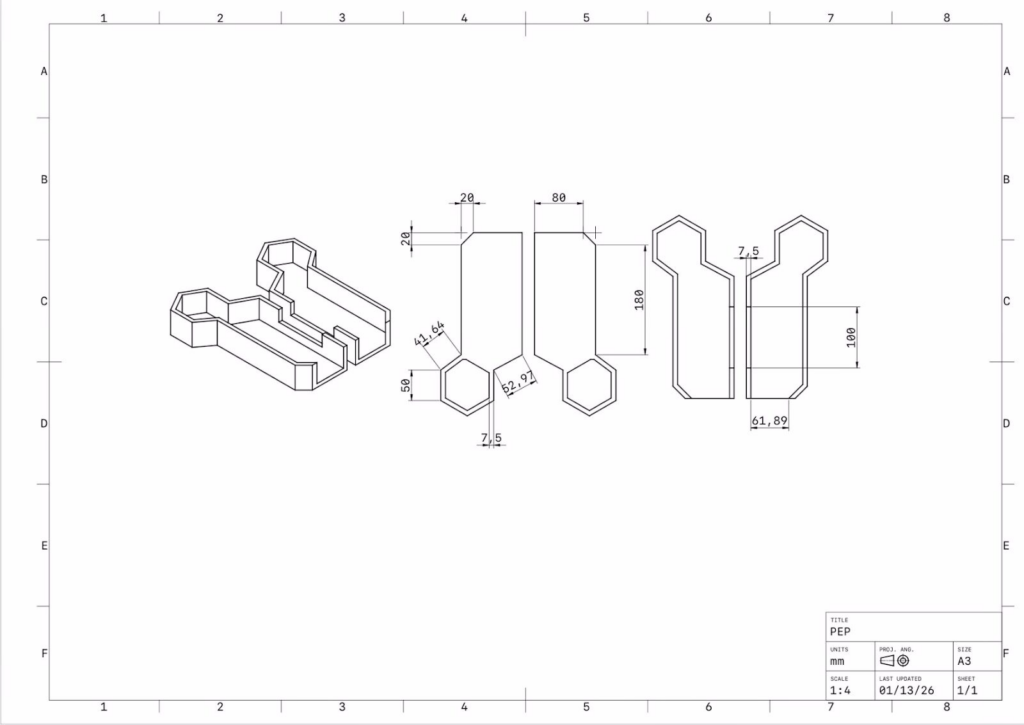
At this point, we decided to restart and create a completely different design. After another member of the group and I worked step by step on the chassis, where the motors and wheels would go, we then laser-cut walls for the vehicle before attaching them with hot glue.
The main tests that we are performing on our vehicle design for Titan are the efficiency of the battery and motors, as well as the traction the wheels have on the ground.
Testing & Data Collection
For our testing, we first tested our vehicle’s capabilities by having it drive over a patch of kinetic sand I had spread on a wooden plank. This test wasn’t even a challenge for our vehicle, as it easily passed over the kinetic sand, even continuing off the plank and up the short hill to the grass of the field next to where we were testing.
You can see footage of the tests below. To help support our project and do my group a favour, subscribe to the channel.
Thanks to a video analysis tool that I used to measure distance travelled frame by frame (at ≈60 frames per second), I calculated the vehicle’s average speed at 0.28 m/s (10.84 inches per second) while crossing the kinetic sand.
The second part of our testing was measuring the efficiency of the battery and motors. We measured the battery voltage at 7.34 V. Next, we measured the current of the vehicle’s resistance as 14.05 Ohms. Using this, we calculated the circuit’s current using the formula , resulting in a Current of 0.52 Amps.
After doing this testing, I worked out the input energy from the battery as being the Voltage, or 7.34 V, times the Current (0.52 Amps) and the output energy as being the speed the vehicle moved at, or 30 in/s.
Data Analysis
Our vehicle successfully crossed a patch of kinetic sand around 30 in. long at an average speed of close to 10.8 in/s, or 0.28 m/s. This means it crossed this sand in around 2.8 seconds.
No, I didn’t mistakenly just multiply 0.28 m/s by 10 to get seconds; I just used the in/s speed of 10.8 and divided 30 by this, which coincidentally resulted in 2.8 seconds.
The efficiency of the vehicle’s circuit and motors is measured as output divided by input, which gets converted to a percentage. Thanks to our testing, we have worked out that our vehicle has a total input value of 7.34 Volts multiplied by 0.52 Amps. This means the overall input energy is 3.82.
Our output energy for this vehicle is the kinetic energy () when it moves. The formula for kinetic energy that we are using is
, or
when we input the values for mass and velocity. This results in a total
of 19.86 Joules.
With both the input and output values calculated, we now divide the input by the output, , which means our vehicle is 19.2% efficient.
Conclusion
All in all, this project was a success for our group, especially after our poor start with our first design. Based on the efficiency of this vehicle and the speed at which it moved, I’d conclude that if we want the vehicle to be able to travel far enough on Titan as is required, we would need to dramatically increase the voltage of the battery relative to the scale of the vehicle, as EVs typically are around 77% efficient. While gas vehicles are 16-25% efficient, which we are within, this vehicle uses electricity, so we’d want it to at least be on par with commonly used electric vehicles when starting off on our mission.
If I were to scale our vehicle to life-size, what would be used for a mission to Titan, then we would need to see if it is able to travel 10 km per day based on the efficiency. With a target distance of 10 km at the current efficiency, our vehicle would complete this journey in 2800 seconds, or just over 45 minutes. With the speed and distance being scaled up, our input energy would also need to increase. With our battery Voltage being 7.34 V, to scale it with the speed, we need to multiply this by 10,000. This means our new necessary voltage is 73,400 V.
This is several times higher than what many common EVs use, but if we manage to increase our efficiency to near 100%, this reduces the necessary voltage to around 14,800. With such a high voltage, with the same efficiency or not, our vehicle would need to have a large amount of extremely powerful batteries, most likely the same or similar as powerful electric vehicles like the Porsche Taycan.
This would impact our design’s weight, and perhaps even the interior volume, depending on how much of the vehicle should be accessible to passengers.
As far as how I believe this vehicle may be improved in further iterations, I’d say that, in addition to increasing the voltage as I mentioned earlier, adjusting the positioning and size of the wheels would allow greater stability, which is something I noticed our vehicle lacking somewhat during the testing.
AI Transparency Statement
All text on this page is human generated. Formulas with and without values are the work of https://editor.codecogs.com/.
Leave a Reply