Since my previous update, I’ve progressed on my project. I am trying to build a connection between a brain and a computer, and perhaps eventually the body. I define the problem below
There are 15.4 million people with spinal cord injury, which disrupts the connection between their brain and muscles. Current technology does not reliably restore intuitive voluntary movement. A system that would be able to understand what the user wants to do and stimulate their muscles would restore voluntary movement.
Since the last update, I’ve done research to better understand the potential target market to allow me to focus my project more specifically.
There are two main parts of paralysis I’m looking at: paraplegia and tetraplegia. Paraplegia is the paralysis of the legs while tetraplegia is the paralysis of all 4 limbs and the torso.
I have decided I will start as simple as possible. My procedure is as follows: Use the BCI CV 2a Dataset to train a classification model that gets a minimum 95% accuracy score. Then, I will purchase an affordable EEG headset. I will need to make a new model based off the previous one for the specifications of the new headset.
The main part of the definition statement this focuses on is “understand what the user wants to do.” That part is much safer to focus on because once the human body gets involved, I am at risk of harming someone, for example if I tested it on myself(which I probably would), I might damage something in my body.
The biggest challenge I foresee is coding the classification model because it has been some time since I’ve done any big coding projects, so it might take some time for me to remember.
As of right now, my next step is to create the classifier model.
I have used AI to assist me in my project to help me unpack such a complex topic. The transcripts are listed below:
There are 15.4 million people with spinal cord injury, which disrupts the connection between their brain and muscles. Current technology does not reliably restore intuitive voluntary movement. A system that would be able to understand what the user wants to do and stimulate their muscles would restore voluntary movement.
I am solving this problem for the 15.4 million people who deal with spinal cord injury today. There are two main types of SCI: Tetraplegia which is paralysis of all 4 limbs and some of the torso, and paraplegia where the legs cannot move but the arms still work. I will. specifically focus on helping people with Cervical SCI to help restore upper-limb movement.
Possible Solutions
Noninvasive BCIs connected to electrodes to externally stimulate muscle contraction
This idea is the best for my current position. I do not have access to a lab to implant electrodes and BCIs. Noninvasive BCIs are not as powerful because of the noise that they pick up alongside the brain activity. However, using AI I will be able to remove some noise to detect brain intent.
Invasive BCIs connected to electrodes to stimulate muscle contraction
Although this idea would be much more powerful than the previous, I do not have access to a lab where I could implant an invasive BCI, nor do I have the license to.
Electrodes on the spine to restore connection between brain and muscles
This idea would also require a lab to insert the electrodes on the spine, which is not feasible in my position. However, this idea could potentially be more powerful than idea #2 because instead of getting signals directly from the brain and externally stimulating the muscles, this would theoretically restore the original movement because it is the link between the brain and the muscles.
Implant electrodes inside muscle tissue to make precise movement connected with BCIs
This is not so much of a standalone idea as something to add on to another idea because implanting electrodes in the muscles to get more precise movement would be much better when retraining motor control to help restore fine movements.
BCI controlled exoskeleton
A BCI controlled exoskeleton although it would be simpler than stimulating the muscles, it is bulky and the goal of the BCI solution is to make something discreet to make the people who suffer from SCIs feel more normal.
Possible Prototype for #1
The prototype would be a non-invasive BCI to get signals from the brain. Because the brain still sends the same signals to the body even when they can’t move the body parts, those signals can be read to send signals to different electrodes placed on the body. When the electrodes send a small electrical pulse, the muscle contracts.
What I hope to have ready in May at the minimum is a noninvasive BCI that I can read the signals from to determine some sort of action the user would like to do. Depending on how much progress I make I could either show the results on the computer and make the user do something such as play a simple game like flappy bird/dinosaur jump, or I could connect it to electrodes on my muscles to stimulate them, if I am allowed.
Plan for this Project
The first step of this project is understanding software. I will use an EEG dataset to make a classification algorithm to classify motor intent. Then I will simulate it to see if it works and iterate.
Once I have a working algorithm, I will purchase a noninvasive EEG and use the algorithm to decode the signals from my brain. I will attempt decoding starting at simple left and right imagery, then go into more complex commands and see how good my algorithm is. I will iterate with the algorithm until it is strong enough to use.
After this I will purchase an electrode to attempt stimulating my muscle. I will need to be very careful at this stage because doing it wrong could cause harm to the wearer, which would be me. I may decide not to use an electrode but instead use the signal to send signal to a robot arm, which would move based on the commands.
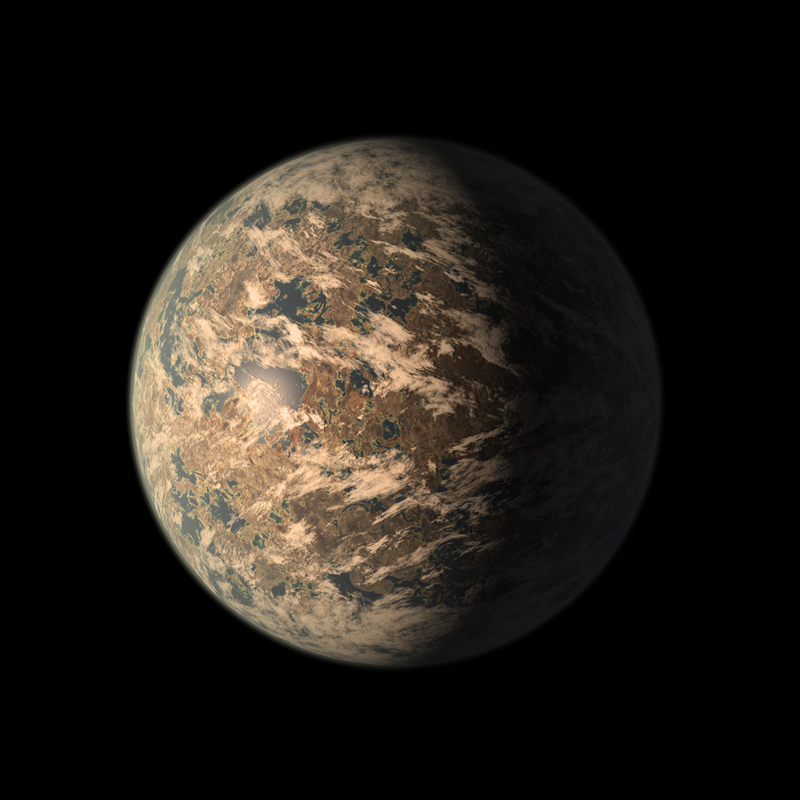
TRAPPIST-1e is one of Earth’s best opportunities for a home beyond Earth. It is a rocky planet with a density very similar to Earth, located about 40 light years away from Earth. Because of the distance from the planet to its star, TRAPPIST-1, it lies in an area called the Habitable Zone. This zone is special because it means there is a higher likelihood of liquid water being present on the planet.
In order to take advantage of this we must build a vehicle to travel through the planet. So we narrowed down the project into one statement.
The Definition Statement
We need to build a vehicle that can withstand TRAPPIST-1e’s extreme contrasting temperatures, traverse the uneven and rocky terrain, and endure the immense radiation emitted by TRAPPIST-1e’s star. Additionally, the vehicle must be large enough to hold at least four individuals and have enough fuel to travel 10km, unless powered by another source such as advanced radiation solar power.
We spent a few days looking over this idea in order to decide how we would go about this process. We focused on one main part of this prompt that is possible to test in Earth’s atmosphere: uneven rocky terrain.
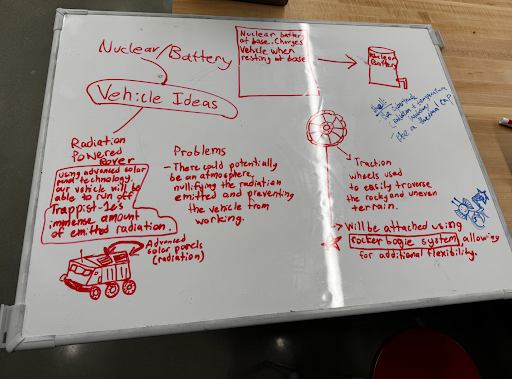
Below is our whiteboard where we drafted many ideas for our vehicle.
Radiation Powered Rover
We thought of harnessing TRAPPIST-1’s powerful radiation with special solar panels in order to power the vehicle. We identified the problem that the atmosphere of TRAPPIST-1e would significantly reduce the radiation.
Rocker-Bogie System
We saw on the Mars rover, they use a special suspension called the Rocker-Bogie system, which is very good at climbing tall hills and uneven surfaces.
Traction Wheels
We decided to use traction wheels in order to have a strong grip on the rocky, uneven terrain our vehicle would have to drive on during its voyages.
Method / Procedure:
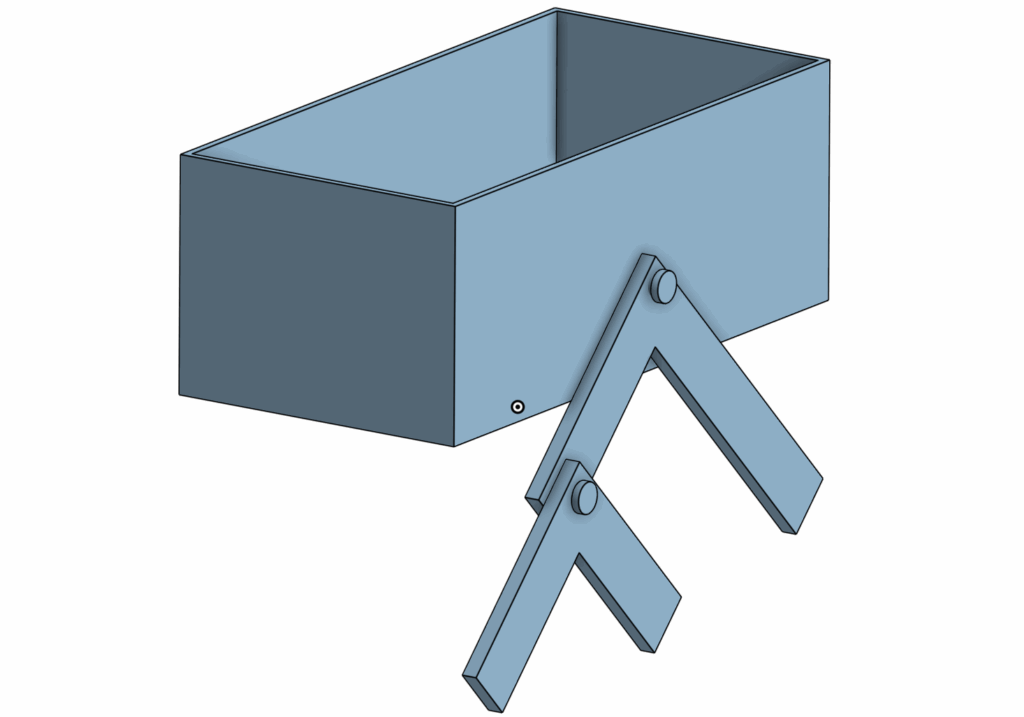
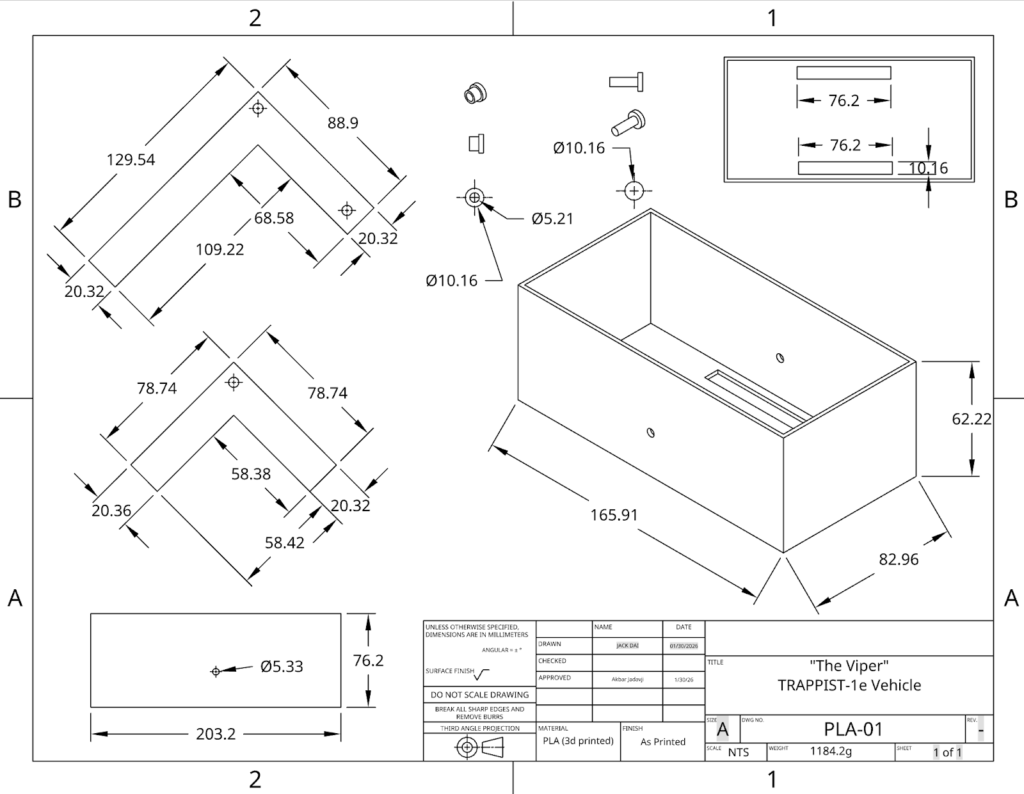
Once we had imagined our vehicle, we started to make the CAD design for it. We went through several designs and iterations before we had figured out what design we would use.
This is what our final product looked like with only one of the rocker-bogie parts on. Normally there is one on both sides. There are four main parts to this:
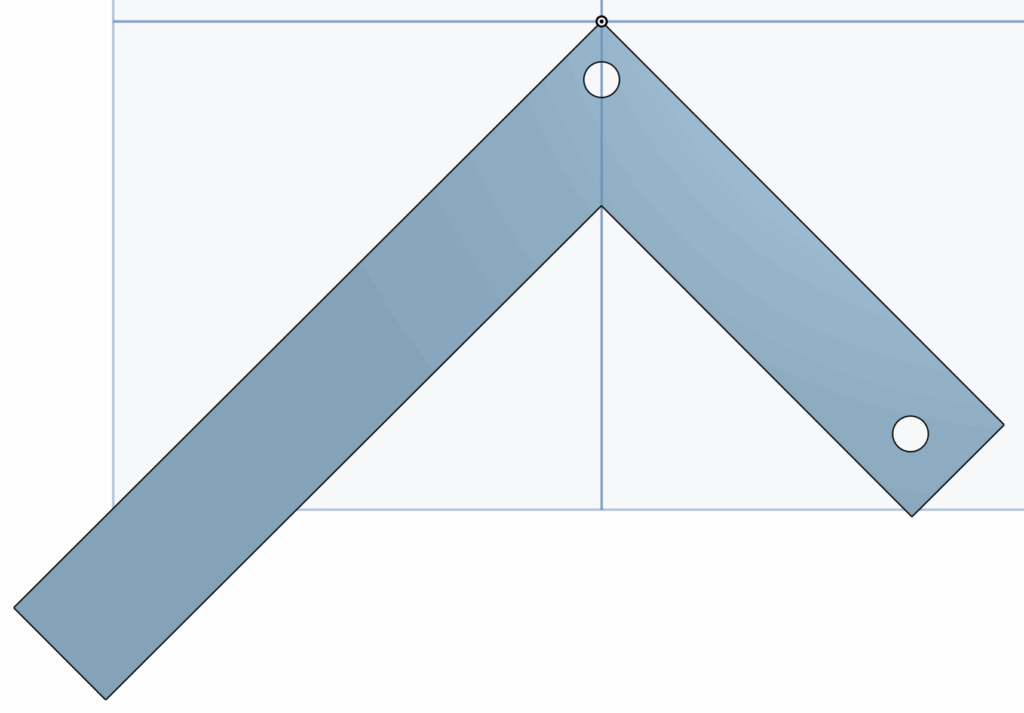
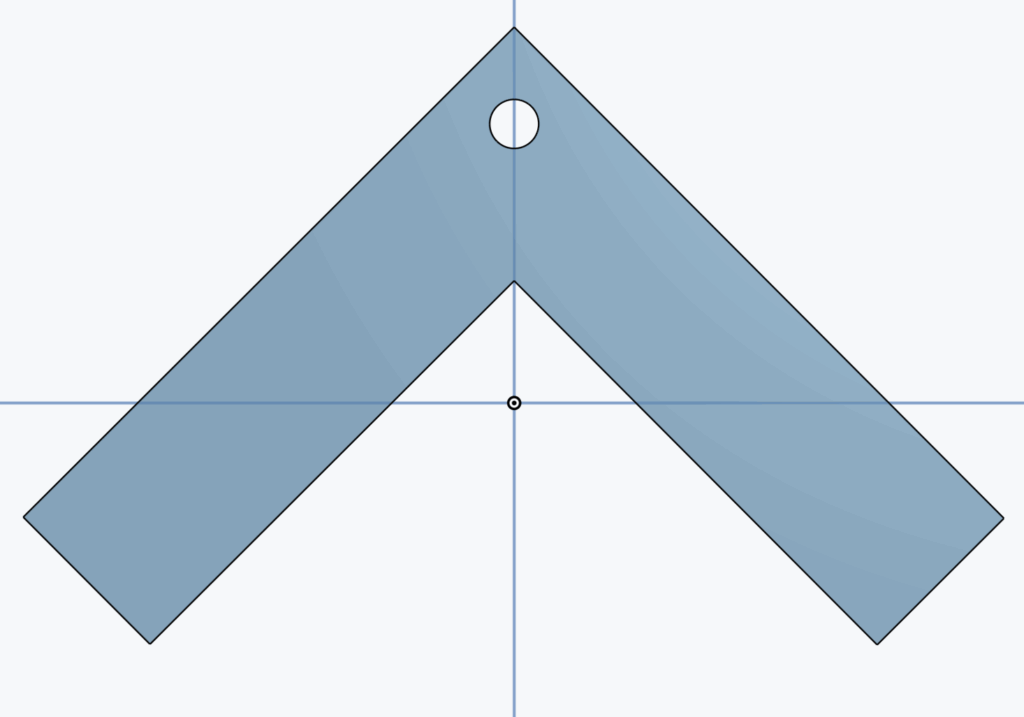
The Rocker
The Bogie
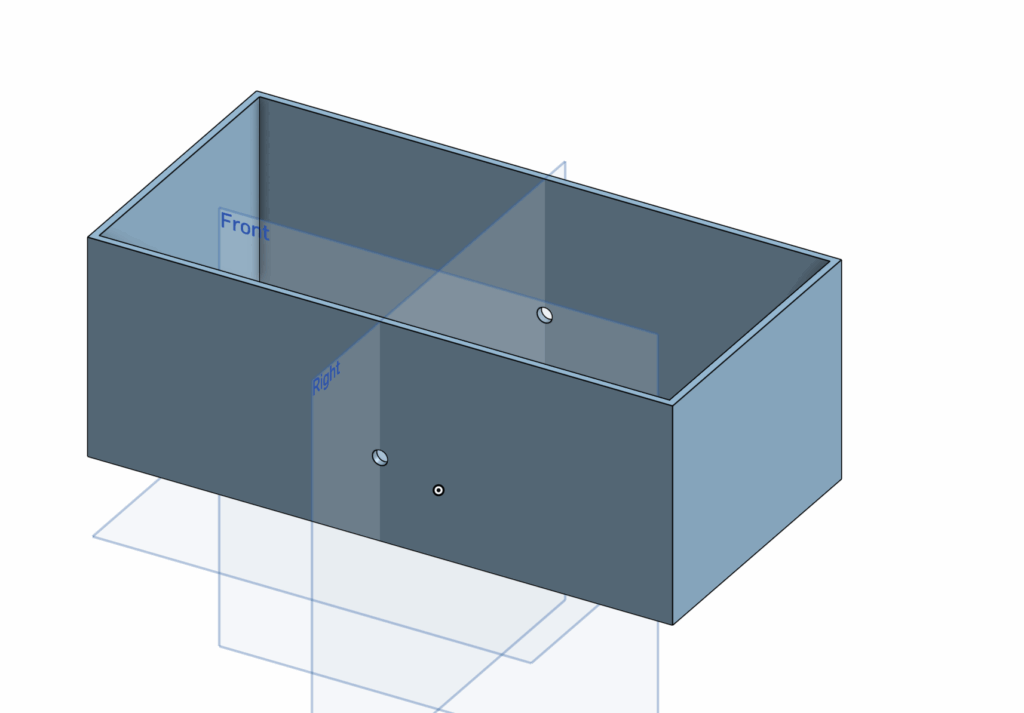
The Body
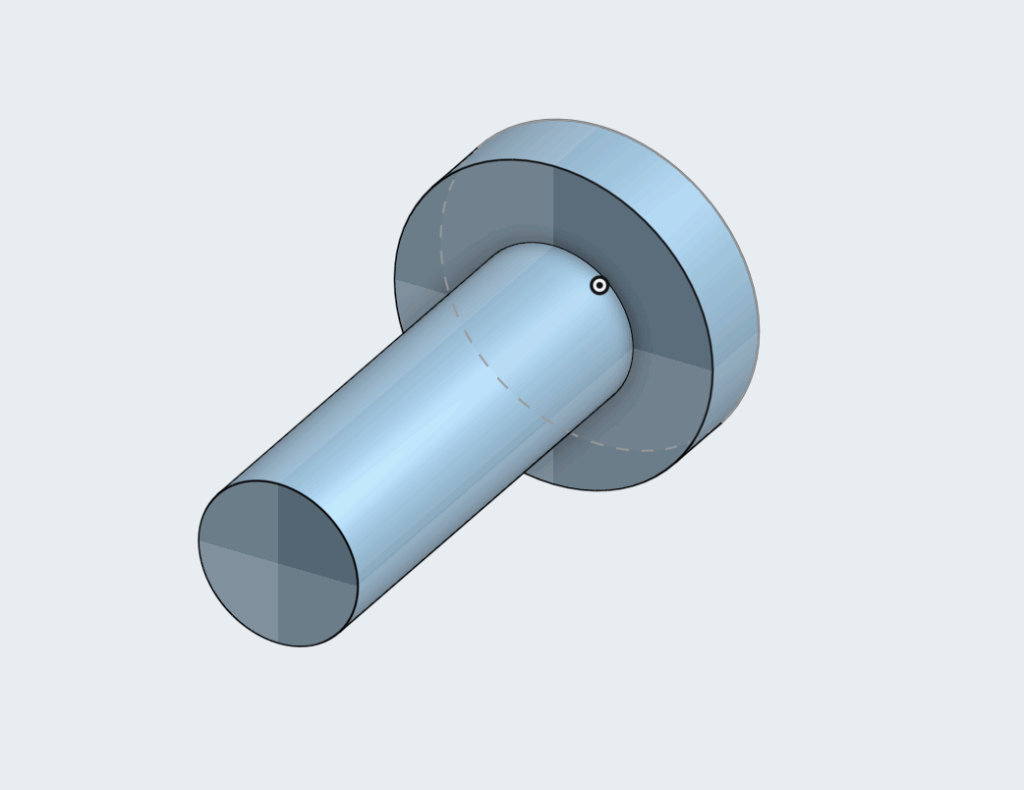
The Screws
The Rocker is the larger piece and it connects to the body with a central pivot point to allow the vehicle to rotate up and down over the rocks.
The Bogie arm is the smaller part of the mechanism and it is connected by the hole on the top to the Rocker arm. It stays in the rear and its job is to keep the wheels in contact with the ground as much as possible to maintain consistent movement.
The body is made with two holes that, if you look straight at the vehicle from the side, you will see is right in the middle. This is because we want the body to stay stabilized upwards and by keeping the hole high up and in the middle, it keeps the people inside safe, while the Rocker-Bogie suspension still does all the work.
The screws were made specially to fit exactly into our holes we made in the body and the arms. We used custom screws to make sure the arms wouldn’t have difficulty rotating.
However, while we were making all these parts for the CAD, we went through many iterations and failures. We spent a long time thinking about measurements and lengths of the arms. Using Onshape was a process of trial and error because we still didn’t fully understand everything, especially assembly at the end.
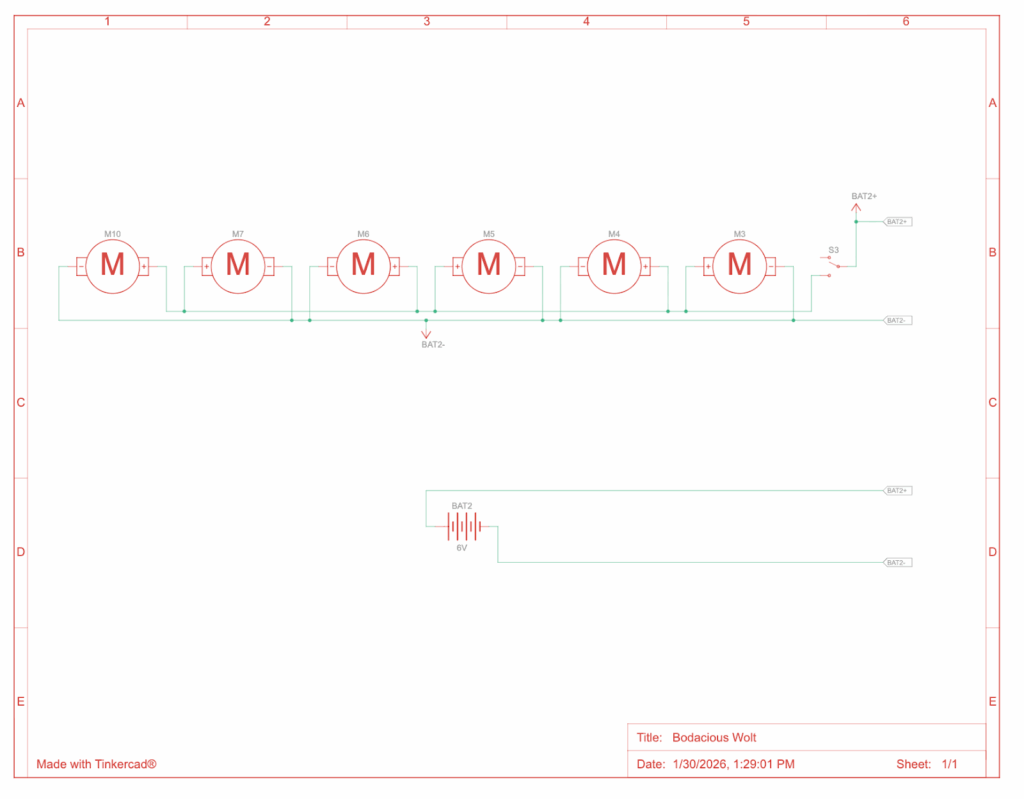
We made a diagram for the circuitry to make sure building everything would be as fast as possible as soon as the materials came.
We made an official circuit diagram to show connectivity between each component.
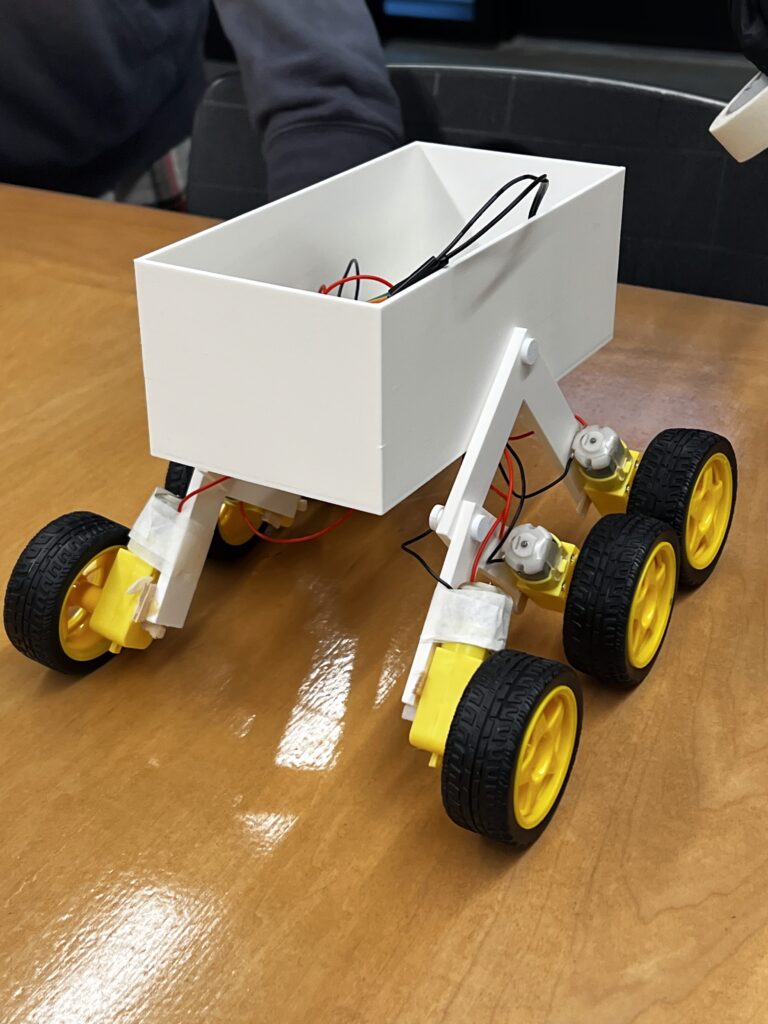
We also purchased 6 motors and 6 wheels to let the vehicle actually move, and glued them onto each end of the arms, 3 on each side. We connected everything with a breadboard attached to some batteries. The process of building everything was very efficient once we had all the parts we needed.
We were very proud to finally have built the car. However, in engineering building the contraption is only half the work. One of the most important parts is testing.
Testing / Data:
The first “test” we ran was immediately after we had built the vehicle. We were happy to see it drive well on flat ground. It drove pretty straight and at a consistent speed.
Next we decided to test it on bumpy terrain by putting some thick pieces of styrofoam on the floor and let it drive through them. We noticed that it had trouble doing this because the distance between the wheels wasn’t big enough for it to fully go over with the Rocker-Bogie mechanism. We learnt that it had a limit, it could go over smaller bumps, but it had difficulty with big ones.
Once we were satisfied that our vehicle could drive, we began the real testing.
Test #1: Rocky Surface
Our first test we planned to do over gravel in order to mimic the terrain that TRAPPIST-1e would have. The goal of the test was to see how efficient the vehicle was on an uneven surface. We used a multimeter to measure voltage before and after and current during the test. We also measured the distance travelled and the time it took.
The vehicle did well on the test and travelled on the gravel as we had wanted it to go. We had also collected all the data we needed and were happy with how we ran it.
Test #2: Smooth Surface
We wanted to see how the car would do on a flat surface to compare it to the run on gravel. This is important to determine the efficiency of the suspension we made. We made the test as similar as the previous test, the only difference being the terrain.
The vehicle did well on the test and drove in a proper straight line. We were happy with the results from this test because this meant we could calculate comparative efficiency.
Test #3: Test Day
On the final Test Day, our vehicle broke down so we were unable to test. One of the wires for a motor broke and without enough time to solder it together, we had to sit the test out.
However we had already gathered enough data to do a good analysis of our vehicle.
Analysis
The goal of this analysis is to determine the efficiency of the vehicle. Efficiency is defined as useful energy output divided by total energy input. Because of the limitations of our data, we are unable to measure useful energy output. In engineering, another concept is commonly used called traversal efficiency, which is defined as distance in meters the vehicle travelled per Joule of energy used.
The formula for electrical energy is written below.
Where V is average voltage, I is average current, and t is time. We calculated average voltage with the voltage before and after the test. Similarly, average current was calculated with the average of the current at different times during the test.
Test #1:
Test #2:
Results:
Test #1:
Test #2:
Comparative Efficiency
Based on the two tests we did, we can compare them to understand how much the obstacles affected the vehicles ability to drive.
This means that the vehicle was 72% as efficient on gravel compared to smoother terrain.
It is important to note that true efficiency in this case should be mechanical efficiency. In order to calculate this, you calculate the product of force and distance, all divided by energy input. We are unable to calculate it because it requires us to measure friction or torque. Therefore our method for calculating efficiency is much more reliable and would not rely on estimates.
Conclusion / Evaluation:
From this process, we learned how to bring an idea to life. We started small in the brainstorming stage, thinking about little details and piecing together a design prompt. Then we went to the designing stage, going through many designs of how we pictured the vehicle in our heads and putting it on the CAD. After that, we 3D printed it and put everything together. Once we did that, we went on to test the vehicle a few times to understand how good it really was.
We as a group were proud of how we performed. Our vehicle made it through almost all of our tests and had some pretty strong results. One thing that surprised me was the efficiency results. For the gravel test which was meant to simulate the real planet, we got 72% relative traversal efficiency. This is a descent result, it is 28% less efficient on uneven surfaces, showing the effect of rocky terrain.
Had we the opportunity to improve our design, first of all we would redo the CAD to increase the distance between the wheels. We learned about this issue on our second unofficial “test” where we tried driving the vehicle over thick pieces of styrofoam. The wheels would get caught against each other as it tried to drive over.
However, I think the design was still well made and I think it would work on our planet, TRAPPIST-1e. Although it is too far for us to see exactly what the terrain looks like, based on the predictions of the terrain, it is rocky and uneven. This is precisely what our vehicle is made for, which is why I think it would perform well.
To summarize the design prompt, we need to build a vehicle to survive TRAPPIST-1e’s dangerous conditions and carry 4 passengers over a distance of 10km. Our design has the potential to do all of this. It will, of course, need some larger tweaks as we scale the vehicle, but the general design our group made would perform on our planet.
Trappist-1e is one of humanity’s best candidates for a future home. It lies in Trappist-1’s habitable zone, meaning that there is a chance of liquid water, the most important factor to human survival. It’s a rocky planet approximately the same density as Earth.
Even though Trappist-1e is 39 light-years away, it has many good opportunities for humans. Because Trappist-1e has similar gravity to Earth, humans would adjust easily to the new environment. Trappist-1e and the other planets in the Trappist-1 system have a good chance of having water because they are in the habitable zone and Trappist-1e specifically has a rocky composition similar to that of Earth’s. According to the TRAPPIST-1 Habitable Atmosphere Intercomparison (THAI) project, even with many different atmosphere possibilities, Trappist-1e has a good chance of being livable, the main exception being if it has no atmosphere.
Settling on Trappist-1e has some serious challenges. The planet may be tidally locked, which would mean that one side is in constant daylight and extreme heat and the other side is in permanent darkness with extreme cold. The only habitable part would be the twilight zone. Another big problem is that we don’t know what type of atmosphere Trappist-1e has, or whether there even is an atmosphere. Based on research by JWST, Venus and Mars-like atmospheres are ruled out, however there are still a few problematic possible atmospheres. Without an atmosphere, humans would experience extreme cold and strong radiation from the Trappist-1 star, which is known to produce strong radiation that could harm people and damage equipment. Because Trappist-1 primarily produces infrared light, agriculture and energy generation would need to be redesigned to work under the low red lighting instead of the Sun’s bright rays.
The environment has a large implication on vehicle design. Even though humans would live in the twilight zone, travel to the hot and cold sides would be necessary to get resources like frozen water and metals. This implies that vehicles need temperature-control systems. Vehicles would need to be able to handle radiation flares. The atmosphere of Trappist-1e is unknown, but there is a chance that there is no atmosphere at all. If there isn’t, the vehicle must be equipped to handle travelling in an environment like this. Depending on what atmosphere, the planet has, the vehicle should be properly equipped for those conditions. Lastly, they would need to be equipped to drive the probably rugged terrain of the planet.
In order to build solar-powered vehicles, the design would need to be modified to work with infrared radiation because the Trappist-1 star primarily emits infrared light. Infrared light does not have as much energy as visible light, which means stronger solar panels would be needed.
Everything we know about Trappist-1e is from telescopes and analyses. It was discovered using the transit method. The transit method works to detect exoplanets by measuring light from a star and when the light gets lower for a bit, it could mean a planet passes over it. If this happens repeatedly in a cycle, it likely means there is a planet. The Trappist-1 system was discovered by the TRAPPIST-South telescope. Later, NASA’s Spitzer telescope captured much more precise transit data which told them about all the planets, their radii, orbital period which is how long it takes for a planet to orbit its star, and that it is likely a rocky planet.
In 2018, researches such as Grimm et al. published a paper called “The nature of the TRAPPIST-1 exoplanets” documenting how they used something called TTV which stands for Transit Timing Variations to calculate the masses and densities of all Trappist-1 planets. This told us that Trappist-1e has an earth-like density and confirmed it is a rocky planet.
More recently, the James Webb telescope was used to analyze starlight passing through Trappist-1e’s atmosphere using powerful tools such as NIRSpec, NIRISS, and MIRI. These can determine what gasses are in the planet’s atmosphere. The data says that Trappist-1e likely doesn’t have a Venus or Mars-like atmosphere, however it doesn’t mean that the atmosphere is suitable for humans yet.
Lastly, there was a large climate modelling project called the THAI project(Trappist-1 Habitable Atmosphere Intercomparison). It was a community project with multiple supercomputers to run multiple GCMs(global climate models).
Trappist-1e promises a good future for humankind. If we’re lucky, Trappist-1e will be the perfect planet for human beings to settle in the future, once we figure out how to travel to it.
Reflection on AI Use
I used AI to help me research about the project and to write the APA sources list. It was very useful to learn specific things that I found harder to find by surfing the web. I also found it very easy for the APA sources because it knows how to do it.
Gillon, M., Jehin, E., Lederer, S. M., Delrez, L., de Wit, J., Burdanov, A., Van Grootel, V., Burgasser, A. J., Triaud, A. H. M. J., Opitom, C., Demory, B.-O., Sahu, D. K., Bardalez Gagliuffi, D., Magain, P., & Queloz, D. (2016). Temperate Earth-sized planets transiting a nearby ultracool dwarf star. Nature, 533, 221–224. https://doi.org/10.1038/nature17448
Gillon, M., Triaud, A. H. M. J., Demory, B.-O., et al. (2017). Seven temperate terrestrial planets around the nearby ultracool dwarf star TRAPPIST-1. Nature, 542, 456–460. https://doi.org/10.1038/nature21360
Grimm, S. L., Demory, B.-O., Gillon, M., Dorn, C., Agol, E., Bolmont, E., Delrez, L., Sestovic, M., Triaud, A. H. M. J., Turbet, M., Queloz, D., & Leconte, J. (2018). The nature of the TRAPPIST-1 exoplanets. Astronomy & Astrophysics, 613, A6. https://doi.org/10.1051/0004-6361/201732233
Fauchez, T. J., Turbet, M., Wolf, E. T., et al. (2020). The TRAPPIST-1 Habitable Atmosphere Intercomparison (THAI) Project: Motivation and overview. The Planetary Science Journal, 1(2), 17. https://doi.org/10.3847/PSJ/ab9ffd
de Wit, J., Wakeford, H. R., Lewis, N. K., et al. (2018). Atmospheric reconnaissance of the TRAPPIST-1 exoplanets with Hubble. Nature Astronomy, 2, 214–219. https://doi.org/10.1038/s41550-017-0374-z
Greene, T. P., Tamburo, P., Lustig-Yaeger, J., et al. (2023). Thermal emission from the TRAPPIST-1 system measured with JWST. The Astrophysical Journal Letters, 948(1), L6. https://doi.org/10.3847/2041-8213/acc1e5
Lustig-Yaeger, J., Grillmair, C. J., Stevenson, K. B., et al. (2023). JWST transit spectroscopy of TRAPPIST-1 c shows no evidence for a thick CO₂-rich atmosphere. Nature, 623, 71–75. https://doi.org/10.1038/s41586-023-06694-0
For this project, I built an Arduino robot that detects the proximity of an object. This robot uses sensors to understand its surroundings and gives an output. Even though there is no movement, it is still a robot because it senses its environment and acts upon it.
I built a proximity-sensing robot. It uses an ultrasonic sensor to measure how close an object is to the sensor. With this it will light up one of three LED lights.
Green if object is in a safe distance
Yellow if object is getting close
Red if object is too close
At the same time it will turn a servo to a specific direction, representing an very oversimplified way of a car backing into a parking spot.
My idea is inspired by how parking sensors warn the driver how close they are to something when parking.
Virtual Prototype
Below is a video of my virtual prototype.
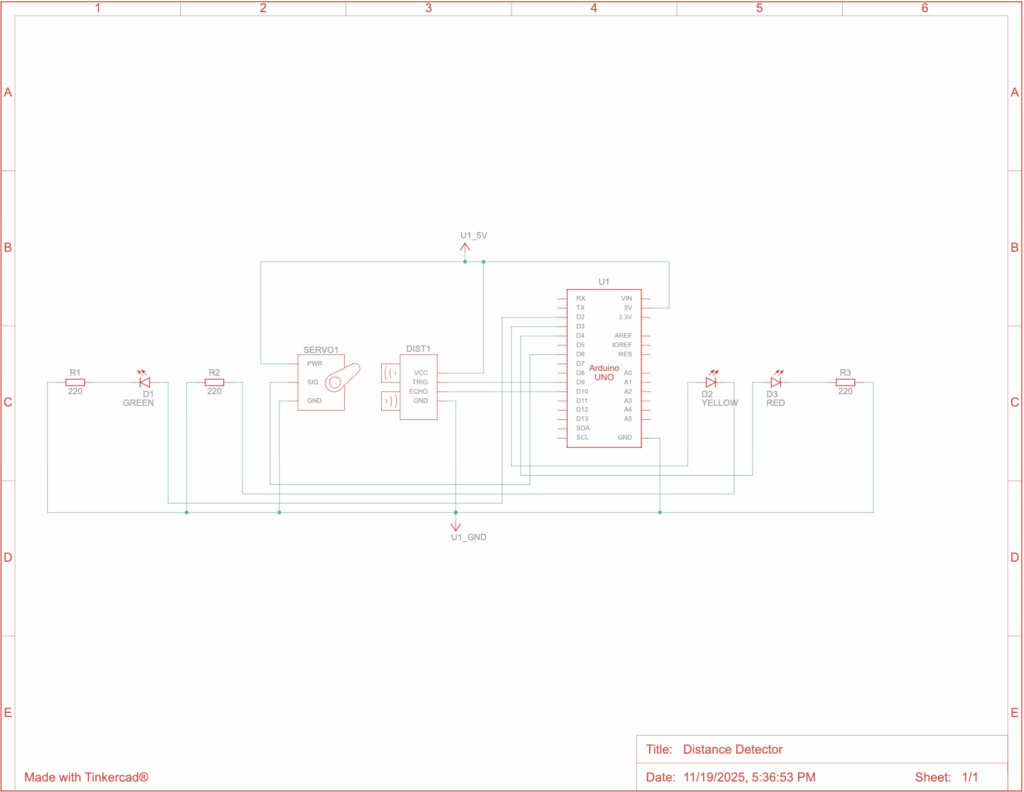
The circuit uses:
A 4-pin ultrasonic sensor to measure distance through sound waves
An Arduino Uno which is the brain behind the whole mechanism
LEDs of three colours to represent distance
When the object comes closer, the Arduino calculates the distance of it by the difference between the time the sound wave is sent and when the echo is received. Then it lights up the specific LED based on the distance and turn the Servo to a specific direction.
Bill of Materials
Arduino Uno R3 x1
Ultrasonic Distance Sensor (4-pin) x1
220 Ω Resistor x3
Green LED x1
Yellow LED x1
Red LED x1
Positional Micro Servo x1
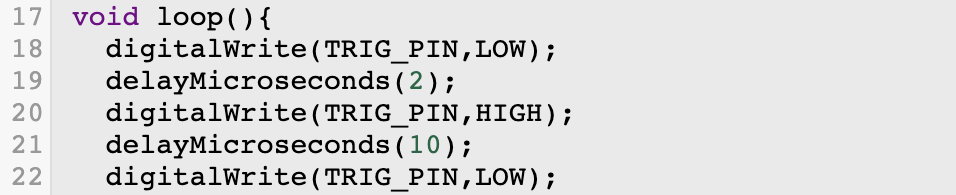
Code – how does the code work?
I learned how to code using Arduino from ChatGPT. I structured my code by starting with setting the wires, then using the Ultrasonic Sensor, and then lighting up the LEDs.
In this code snippet, the ultrasonic sensor is first set to low, then after 2 microseconds, it is set to high, then set back to low after 10 microseconds.
Here, pulseIn() measures how long it takes for the sound to travel to the object and back. 30000UL adds a timeout to make sure no errors occur. If duration==0 just restarts the code immediately if no object is detected.
This line is interesting because it turns time into distance. Sound travels at about 0.0343 cm per microsecond. It is divided by 2 because the sound goes to the object and then back.
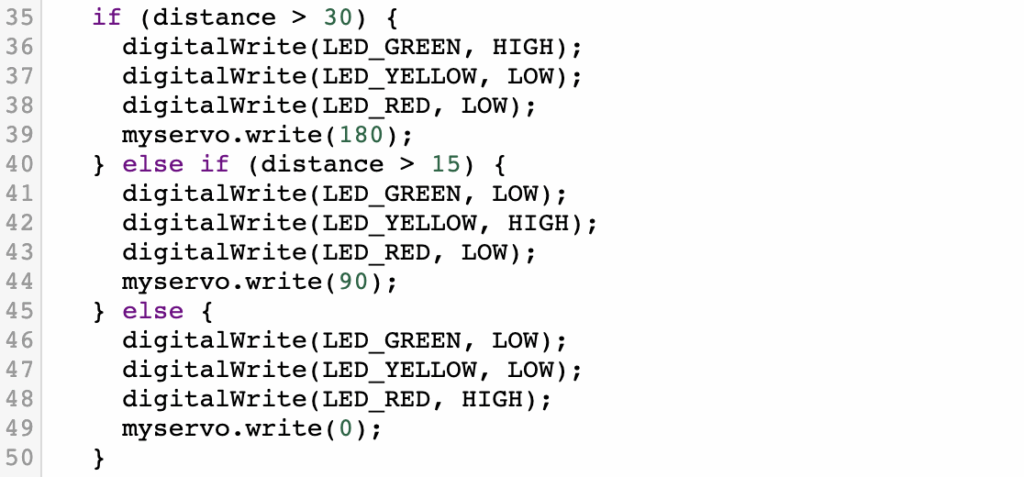
This final code snippet tells the Arduino when to turn on which LED.
Green if distance over 30cm
Yellow if distance over 15cm
Red if distance is less than that
It also will turn the Servo to a rotation based on the distance to the object.
Physical Prototype
Unfortunately, due to the time constraint on this project, I did not make it to actually building the physical prototype.
Below is the circuit diagram.
Reflection
This was a fun project to do and it taught me a lot. I had never built anything with Arduino, but I’ve heard a lot about them. I used to do robotics in my old school for the VEX V5 Robotics Competition and that taught me a lot of the basic skills for robotics, which were helpful for this project and gave me a leg up in the beginning. However, this was much more realistic and complicated. In VEX, I found it much simpler because they had pieces to build the robots and very comprehensive coding. This was a much newer experience and made me learn a lot more.
When I was working on this project, the biggest problem I had was actually building the physical prototype. I originally thought I would have enough time, but when I didn’t, that presented a problem where I realized it would make my grade worse on the project, but I didn’t see anything to do. The other problem was that I wanted to include the whole car so it can back up. This was way too much work, so I simplified it to just including a microservo spinning to certain directions depending on the distance to the object to simulate the wheels of a car spinning.
AI Use & Transcripts
I used ChatGPT when I was building this project. It was useful to help me find a good idea for the project and to teach me how to code with Arduinos, which was new to me.