PEP(Planetary Exploration Project) is a project to design a vehicle that will function on a exoplanet/exomoon of choice. We chose Titan(Saturn’s largest moon). We chose this because of many promising things about it that we could use to our advantage, like a subsurface ocean, abundance of methane and ethane, and the atmosphere shielding us from radiation. When designing a vehicle suitable for Titan, the critical problems we must consider are its ability to accommodate 4 people and its machinery under extreme temperatures of -180°C, hold sufficient energy to travel distances of 10km at a time, be able to produce oxygen, and have sufficient traction to grip Titan’s unique surface of ice, dunes and pebbles alongside combating the lower gravity similar to the moons(definition statement). We started with a rough sketch of the vehicle(very similar to the initial design). I then modeled its housing and we printed it as well as all the other parts required.
Our tests were mainly aimed at finding:
The effectiveness of our design(spike treads) on different terrains that tried to imitate Titan’s terrain;
Finding the efficiency of our vehicle, and seeing if our prototype, once scaled up could drive 10km.
Procedure
Our tests were intended to find efficiency and test the vehicle on surfaces mimicking Titan’s terrain. Our desert environment could be something like a large pillow, so that the surface is easily compressed under heavy enough weight, or it could be simply just sand. This is going to be great as a way to see how our treads will perform in Titan’s sand dunes. The surface ended up being a bed of kinetic sand.
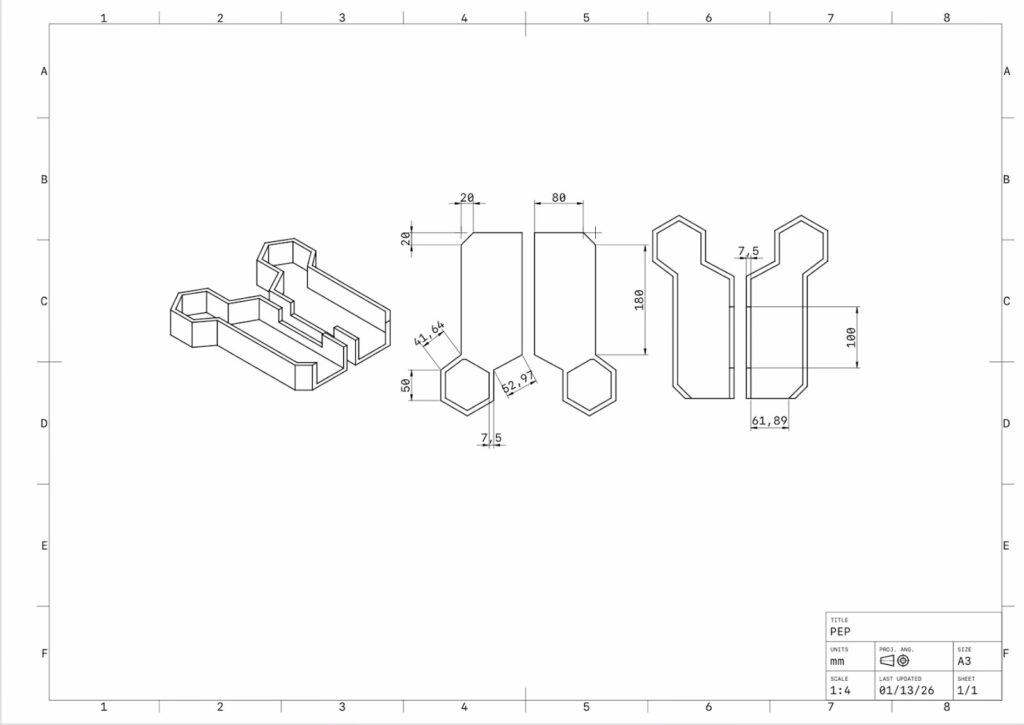
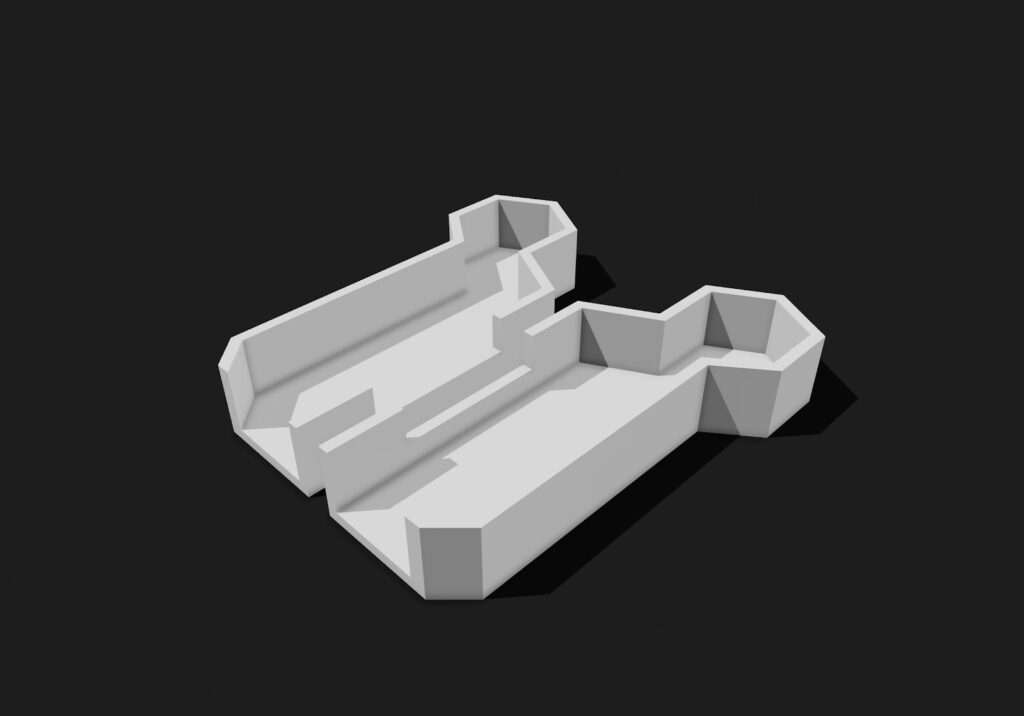
These CAD designs shown below are the initial design of the housing/main body of our vehicle. This was based on a sketch Cooper made.
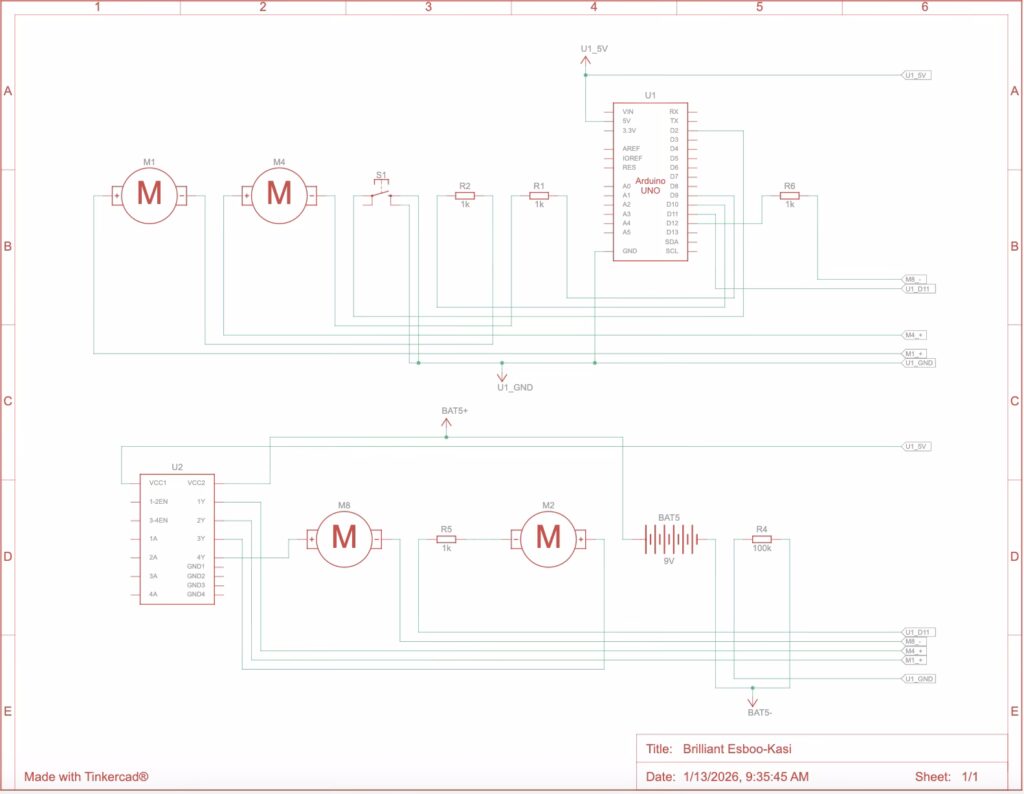
This picture below is the schematic of the initial design of the Arduino system of the vehicle.
Failing is part of the process when making something new like this. Our first failure was the housing. It was made unnecessarily complex and raised issues with balance. Another issue was that our wheels, which were supposed to have treads didn’t have any. We decided that we didn’t have time to redo the wheels and instead used a combination of tape and hot glue to emulate the treads. We also had issues with the wheels, since they couldn’t fit on the vehicle when we tried them on. This was during the first test day so unfortunately we did not test that day.
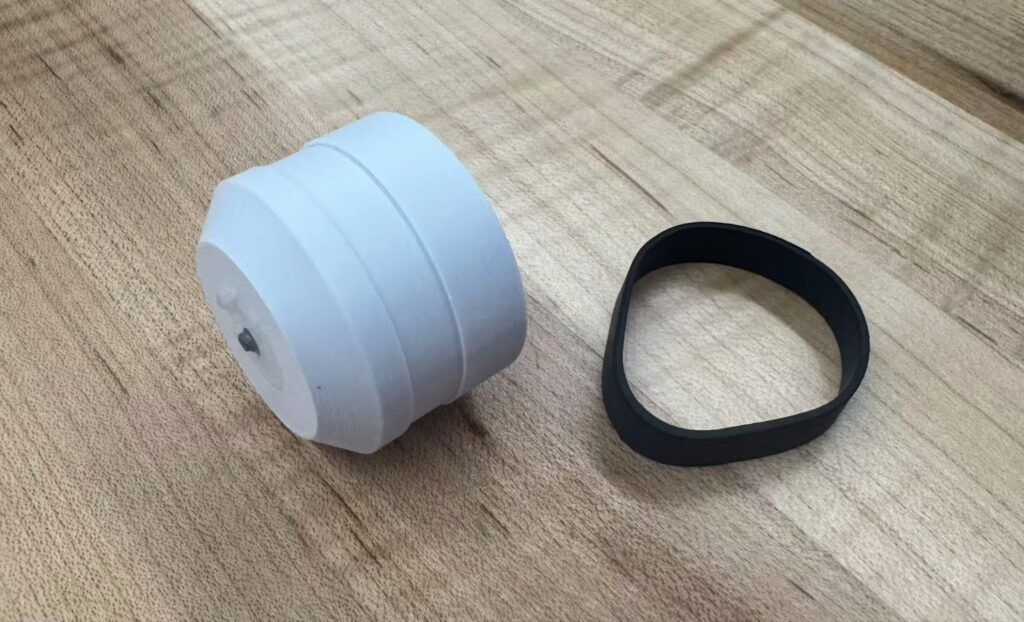
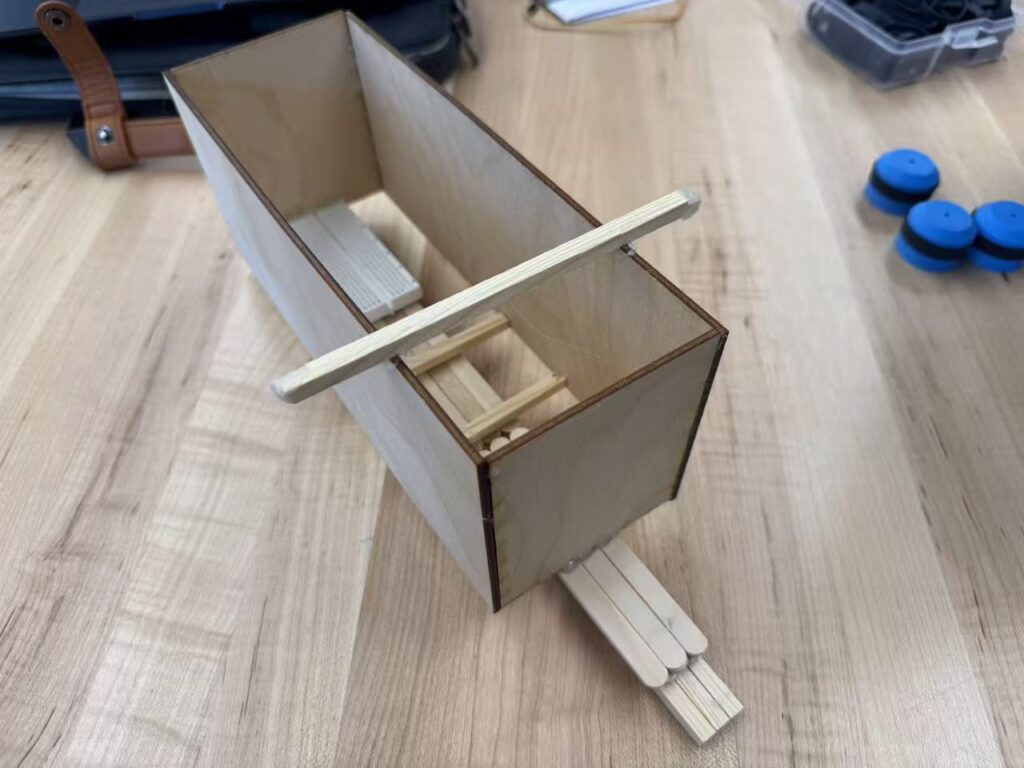
For our final solution, we scrapped the complex and unnecessary housing for a much simpler cuboid. We decided to expose the roof(although not practical on Titan) to allow us to easily access the space inside the vehicle, where everything would go. We also placed a small counterweight on one of the sides because we encountered balance issues. We also redesigned the wheels to be much simpler, with a rubber band around it.
Final Test
We tested 2 main things: the performance of the vehicle on sand and the performance of the vehicle on normal ground. We wanted to do another test for slippery surfaces but we did not end up doing that. Attached are the videos of the tests:
The tests went well and we expected the result. We were not going to use the sand test to measure efficiency, rather then flat surface test because of the sake of accuracy. Through video analysis we got output energy of the vehicle.
Analysis
The data we collected was mainly finding efficiency. Efficiency is calculated through this equation:
We chose to use the whiteboard test rather than the sand test just because the whiteboard test was smoother and easier to collect accurate data on. In order to find input energy we need to find the voltage and current of the vehicle, which we did with a multimeter. Our voltage is 7.34V. When trying to find our current, we got a response, but it came out as -0.00, and nothing happened on the other multimeter. We decided we would find current through finding the resistance, which was 14.05Ω. Since I = V/Ω, our current is:
and our input energy is
For our output energy, we used the video analysis lab. Here is the graph of the vehicle’s position over time, as well as the velocity:
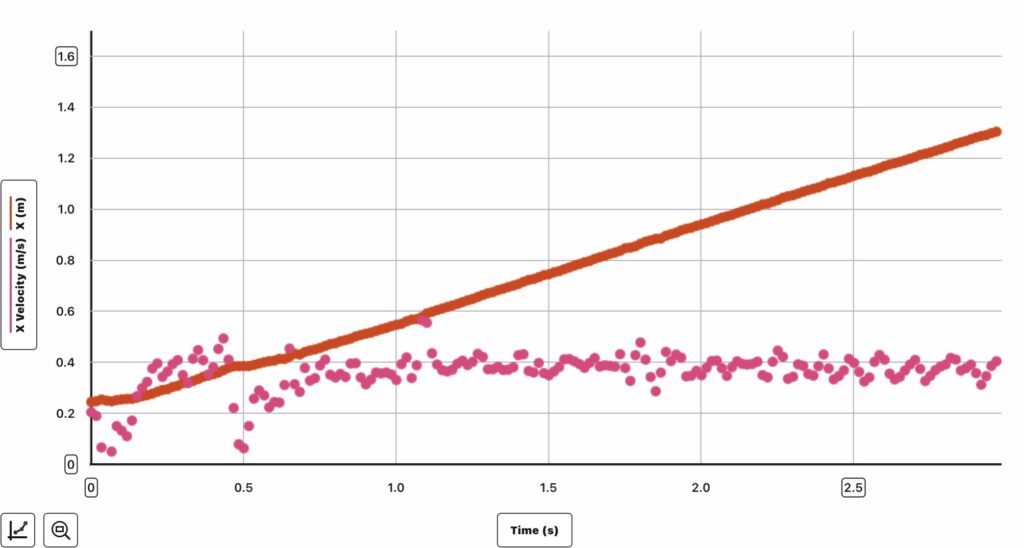
Over the span of 2 seconds, the vehicle’s velocity was an average of 0.347m/s, with a standard deviation of ~0.098. Our vehicle weighs 506.7g, or 0.5067kg. Now that we have all the data necessary to find efficiency, we can calculate it as such:
This energy efficiency is surprisingly low. One reason might be the way we calculated the current. It would obviously be much more accurate if we were to measure the current itself, but with the issues we had with measuring current this was the best result we could get.
Conclusion
We can conclude from this project that it’s probably smarter to plan further ahead than we might’ve thought. We also should’ve documented things better and thought things through. Based on what we have learnt a few things I would do would be to:
- Improve wheel design, specifically the treads and wheel size
- Secure the circuit well(some wires started disconnecting during testing)
- Invest in some better motors & power source because clearly our vehicle isn’t efficient
- Make the vehicle more accurate to what we drafted
If we were to bring our design to Titan we would probably die. First of all, we didn’t do any type of insulation that we planned on doing. Second of all, the wheels were too poorly planned and I don’t think it would’ve moved much in deep sand dunes and ice. Third of all, we would run out of fuel before moving any meaningful distance, not to mention that we would have 4 people on the vehicle. We also could try to take advantage of the hydrocarbons on Titan but obviously it’s not easy to do in a Fusion lab.
AI Transcript
AI was used to try to find the current of our vehicle(we failed). Attached is the transcript:
Leave a Reply