Introduction
As a recap, the final goal of this project is to create a low cost autonomous drone system that detects wildfires early using infrared cameras and environmental sensors. By deploying many of these drones in high risk areas, the system will provide faster and more reliable fire detection than current methods, and will in turn help stop small fires before they get out of control. The final product will be scalable, energy efficient, and fully automated, so we don’t have to rely on human monitoring and expensive infrastructure. For this initial prototype, I am focusing on the fire detection aspect of the system—arguably the most important component of the product.
–
Progress Report
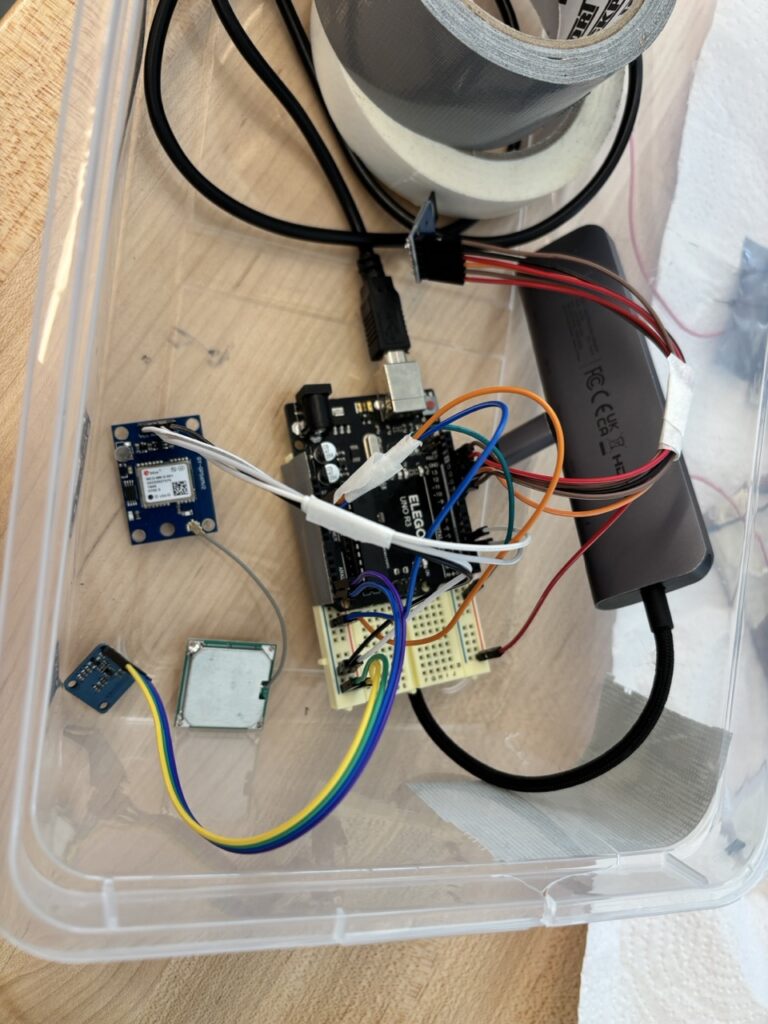
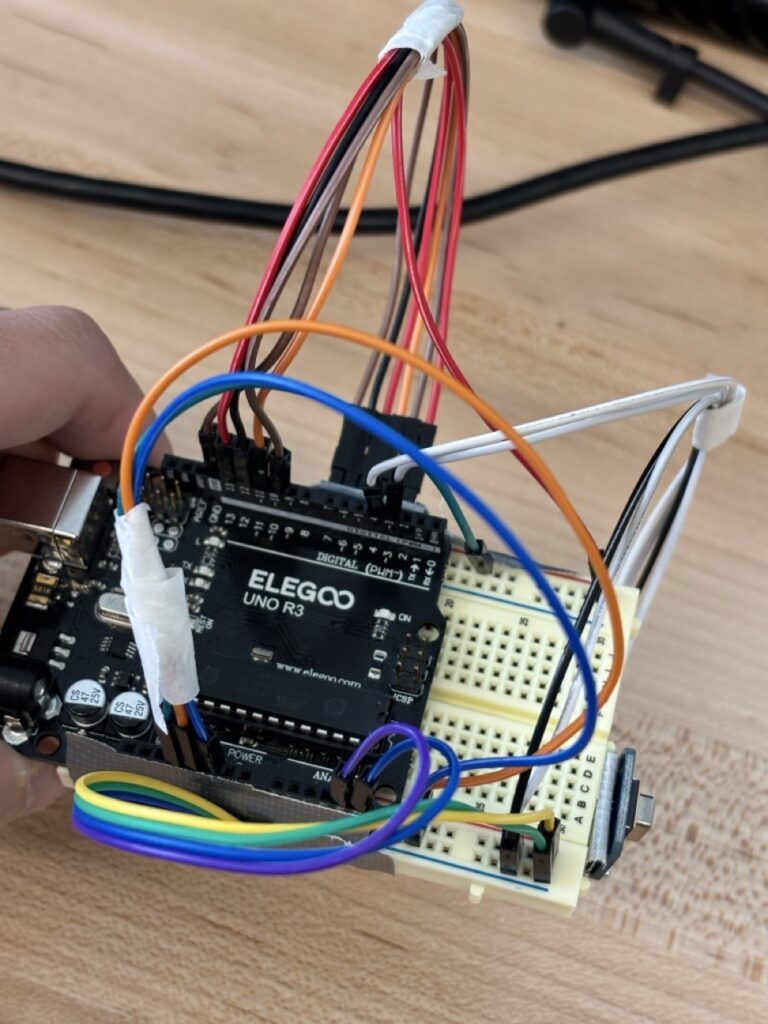
Since my project pitch, I’ve made good progress on my goal of creating a low-cost and autonomous system for early wildfire detection. I have the core components polished already: an Arduino-based control unit, a GPS module to mark down the location of fires, and an infrared sensor to detect hot spots. With these components combined, I have built a basic prototype that I used to test sensor accuracy and data transmission in controlled conditions.
Along the way, I had to change the circuitry layout multiple times and rethink how this system could work and be simplified even more (for the sake of cost and easiness to make).

–
Challenges
Of course, to this point, I have hit some challenges, especially regarding making the system reliable and produce consistent results.
The biggest struggle I have faced so far was getting the GPS module to work. It only outputted usable data some of the time, and I had to experiment with the location of testing, code layout, and many other factors to get it to produce coordinates reliably.
One more challenge I faced was finding the optimal electronics layout. As the final product of my project is meant to be attached to the bottom of a relatively small drone, the electronics have to be compact and lightweight. I brainstormed many different ways of connecting wires on this prototype to minimize its footprint and also lessen the amount of physical wires and components it used. As of so far, the system is no more than 50 grams, which is a weight that most recreational drones can carry. This will make in-flight testing much easier later on.
–
What I Have Learned
This project has pushed me to exercise my skills in all areas, from electronics engineering to critical thinking. One of the areas of knowledge that I learned new things in and improved the most was my coding knowledge. Specifically, code optimization. An Arduino UNO is cheap, accessible, and simple to work with, which is why I chose to use it from the beginning. However, it only has a maximum storage capacity of 32KB for code. My project, consisting of multiple components, each needing separate libraries and instructions to work, would not fit onto one Arduino if they were coded inefficiently. I had to cut out unnecessary parts, use functions, and implement efficient algorithms to optimize the amount of space the code took up and lower that as much as possible so that the system would run faster and it would actually fit.
Another surprising area that I learned from throughout this process is project management. Documenting my progress, specifically in versions of code that worked, either fully or somewhat, was crucial in making sure my workflow went efficiently. As there are so many different versions of code I make while experimenting to find a layout that works, I had times where I lost a code version that had something functional, and I had to restart my progress to recreate the working component again. These mistakes led me to learn how to organize saved codes in an organized and categorized way, which helped me in many different project management aspects, like tracking my project progress in general and documenting how many of a component I have used so far, for cost calculation purposes.
–
Next Steps
The next steps for my project involve creating a second prototype that will bring me closer to the intended final product—a fully autonomous drone system capable of accurately detecting small fires in the wilderness and reporting them to responders.
The second prototype will focus on the communications aspect of the drone. My current prototype stores all data collected by the system, such as infrared readings and GPS coordinates, on a MicroSD card through a storage module. However, my end product will need to be capable of sending this information to humans while the drone is in flight, so any fires can be reported immediately rather than after landing. This is what my second prototype will revolve around. It will involve the use of real drones, and I will likely try to hit my communications goals through the use of cell towers, though the final product will also allow drones to communicate with each other, ensuring the data can reach humans even in areas without cell coverage.
–
Leave a Reply