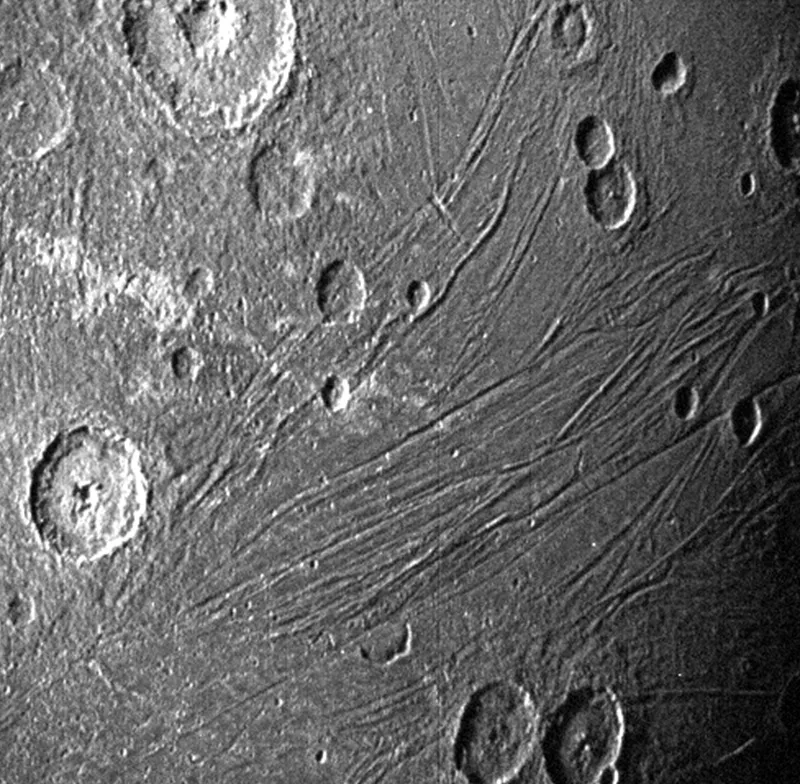
This is a picture of Ganymede’s terrain. It is filled with craters and has long divots across its surface. It is also entirely made of ice so its surface is not only slippery, but extremely cold aswell. These are all factors that have affected our final decision for our robot. (definition statement) Our team must design an efficient transportation method on a foreign celestial body, both without wasting excess energy and without wasting time, capable of a 5-kilometre-long round trip on Ganymede, one of Jupiter’s moons. This vehicle must handle extreme conditions including temperatures as low as -180C, low gravity(a tenth of Earth’s), rocky terrain, and interference from the planet’s magnetic field affecting electronics.
At first we started by putting down as many ideas as we could on a sheet of paper. Some of these ideas involved 18 wheelers, drones, jetpacks and planes. After carefully looking into these ideas we ended up going into depth on the different forms of travel. We looked into how the surface is made of ice and started thinking of unique ways to bypass this downside. Under the icy crust of Ganymede, there is a massive amount of water that sits at above 0 degrees celsius. A fun idea that sparked from this was that we attach a massive drill to a submarine and dig beneath the crust, and then drop the drill bit after reaching the water and have free territory to roam around and start our 10 km round trip from there. The problem that we found that makes the ice bore idea not worth it is how the crust of Ganymede is actually 90 km deep! This means that we would require massive amounts of energy and it would not be efficient at all, which is one of our main goals. Another plan was to take to the skies, but because of how the atmosphere on Ganymede is much thicker than that of earths, it would slow us down as if we were moving through tar which is very unhelpful and means we must stay on the ground.
Our current idea is to have a truck with a massive amount of suspension, big grooved tires with minimal PSI and a high clearance to get over the grooved terrain and get in and out of craters. It will also be equipped with thrusters on the top of it to push the vehicle down in the case of a wind storm but also to put more pressure on the ground in case we are unable to move because of the slippery terrain. The design for our vehicle is intended to test grip and speed on a cold, slippery and bumpy surface. To our prototype, being only a fraction of the size of the actual thing, an ice cube is a massive ice block and if our prototype successfully maneuvers throughout a bed of ice, we can assume that a full scale vehicle will be able to maneuver on Ganymede’s surface. Please note that this is not the final product, but simply a prototype for it. We will quantitatively measure efficiency by taking the amount of distance we travel over the amount of time it takes, giving us the speed in which our prototype is going. This is useful because we are testing the tires and if they lose grip, our time will be slower meaning speed and slippage are related. We will also make qualitative observations about how well the prototype is making it over the bumps of ice allowing us to adjust the robot from there. Our independent variable will be the height differences of the ice that we are testing and our dependent variable will be the speed of the car. The control will be the speed that the prototype goes without any ice.
We also created a Bill of materials for our prototype: – polylactic acid for the 3D model of the car – Velcro (Link) – RC Car (already obtained) – Gorilla glue (Link)
In order to test our prototype to prepare it for the harsh climates of Ganymede, we will bring a lot of ice and a plastic bin to school and drive our prototype over it. This will require ice and a plastic bin, but it may also require a cooler depending on how we manage to obtain the ice. We are currently waiting for permission from the school for use of the ice machine, but if this fails we have the backup plan of bringing a cooler. We have scaled down our prototype to around one thirty fifth of the actual size of the car. This means that the ice on Ganymede will have to be scaled down to around 35 times in order to get an accurate measurement of the surface. Along with efficiency, we will be measuring the overall grip strength of the car and how it holds up against the simulated icy terrain.
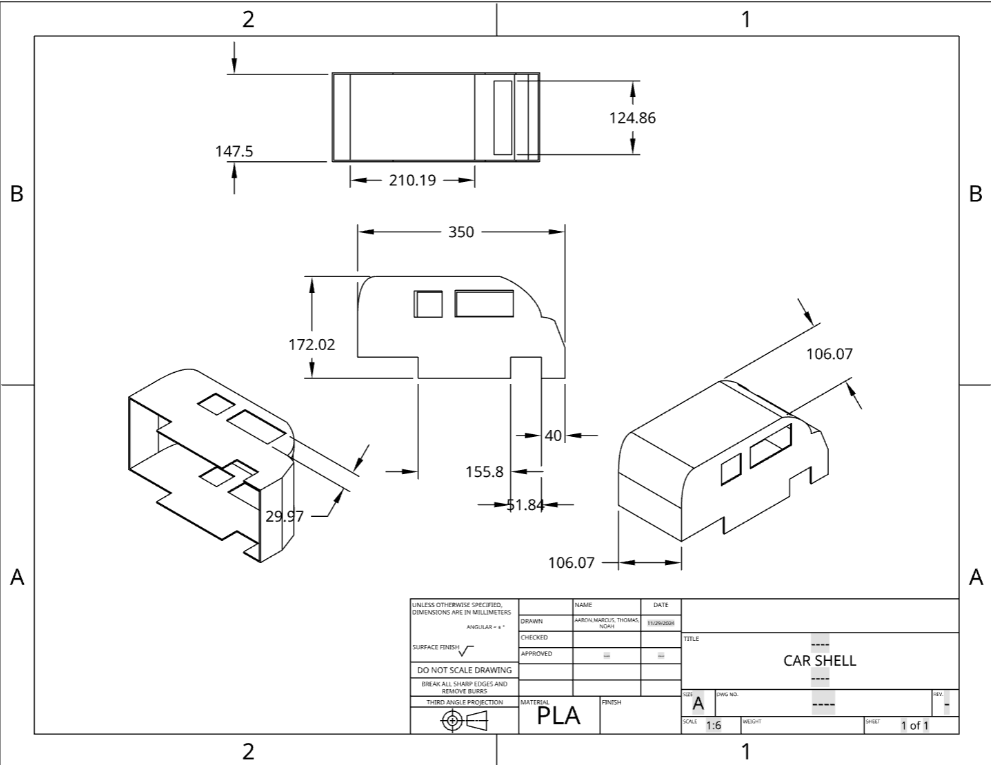
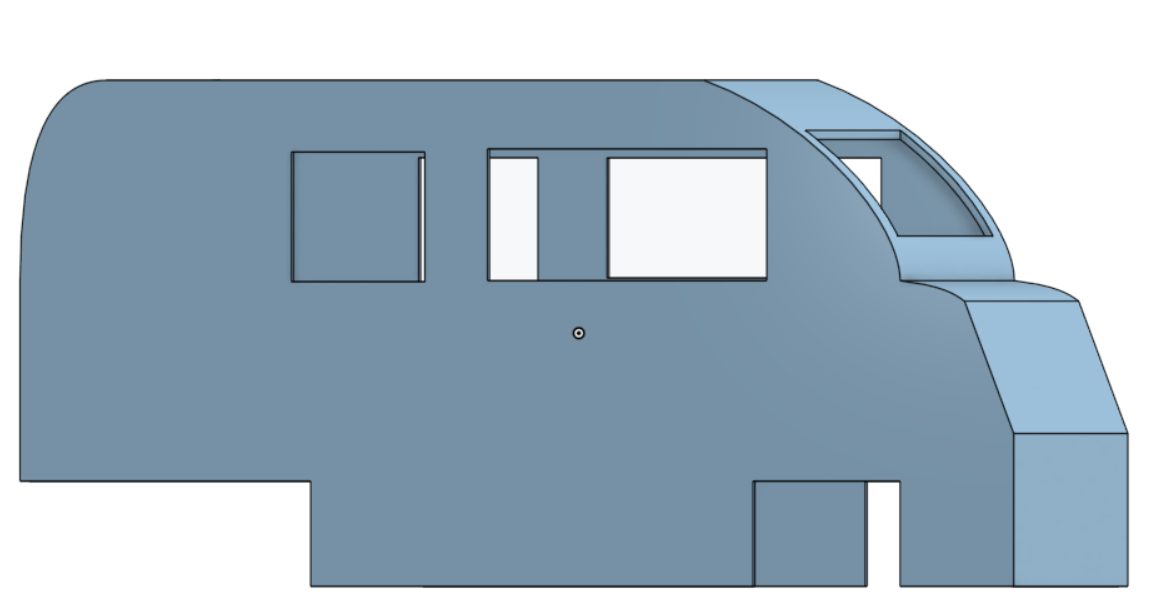
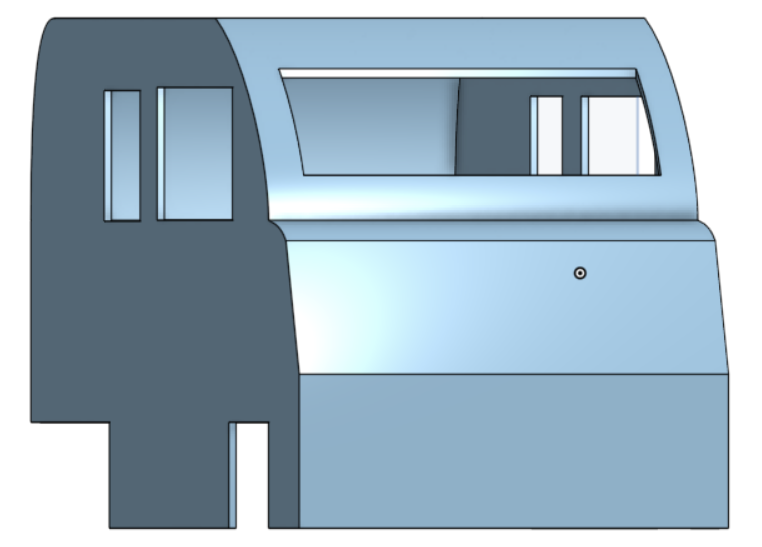
This is a mechanical drawing of the prototype of our build. It includes all of the measurements and also includes the material.
Leave a Reply