My team decided to create a rover for Enceladus, and it is to be tested on its performance on varied terrain, effect of payload, and solar panel efficiency.
Definition Statement
The decision, made by my teammates and I, is that we will construct an efficient eight wheeled vehicle that can travel a 10 km round trip while also withstanding cold temperatures of around – 201 degrees Celsius, radiation, low visibility, low gravity (0.113 m/s2), and rugged landscape.
Ideation Phase
As a part of the idea phase, my teammates and I have made many different potential solutions for building an vehicle on Enceladus, also incorporating the idea of “duck feet,” generated in an activity where we came up with bad ideas, for the wheels. The malleability of duck feet made me think about making the tires for the vehicle soft, just like duck feet, to have more of the tire touch the ground. This is also inspired by race cars, as race cars often decrease tire pressure, making the tire softer, to gain more surface area contact with the track and thus gain better traction.
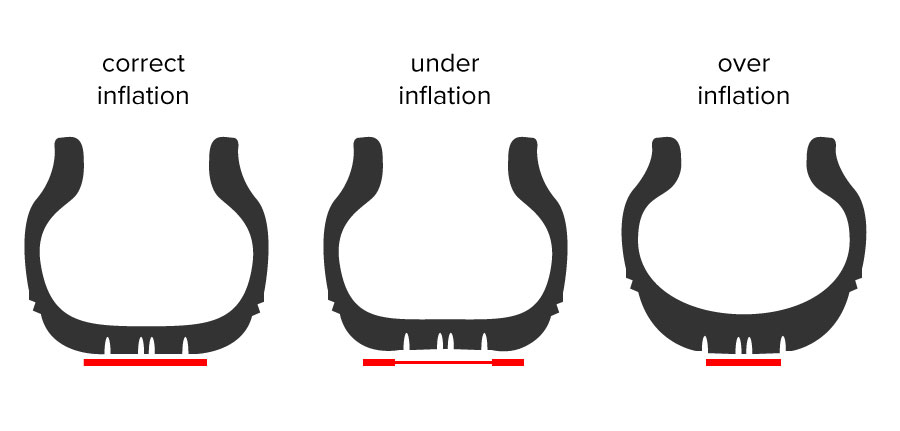
– A diagram of normal pressure, low pressure, and high pressure setups respectively, with the length of the red line indicating the amount of surface area of the tire in contact with the ground.
I also drew inspiration from WRC race cars, which have great suspension systems that allow these cars to be able to easily do jumps and handle offroad conditions, similar to that of Enceladus, due to how the travel distance of their suspensions are longer than road cars, allowing for more compression of the springs in the car. I took the idea of suspension travel to the extreme, as I removed holes from the top of the vehicle to give the suspension enough room, which should allow the car to be able to handle extreme terrain.
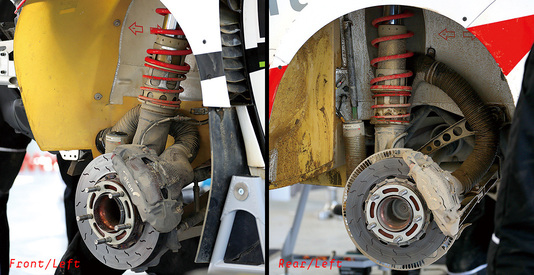
– A photo of the 2019 World Rally Championship’s Manufacturer’s Championship winning car’s suspension.
PROTOTYPE: Purpose and Design
For this project, the prototype is constructed to assess the ability of our design to travel through rugged landscape, inclines, and landscape that could potentially appear on Enceladus. To obtain maximum grip and power, the vehicle has eight wheels, grouped into four groups of two wheels connected by an axle, and each wheel is connected to a separate electric motor. By utilizing the easiness of conversion between solar and electric energy combined with the efficiency of electric motors, the decision is made that the vehicle will be run on electricity, supplied through solar power. The following pictures will show the design of the vehicle in detail.
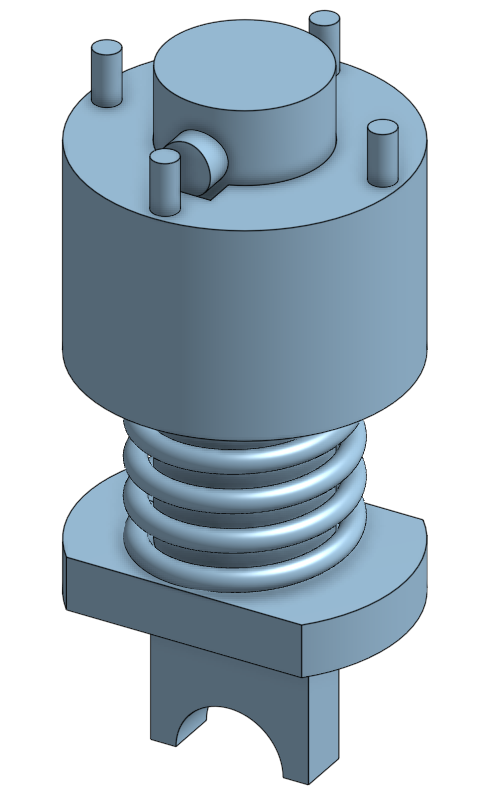
– A picture of the suspension system, designed to be similar to WRC suspensions. The small horizontal cylinder sticking out of the axle at the top of the model also acts as a lock that prevents horizontal rotation and keeps the wheels attached to the body.
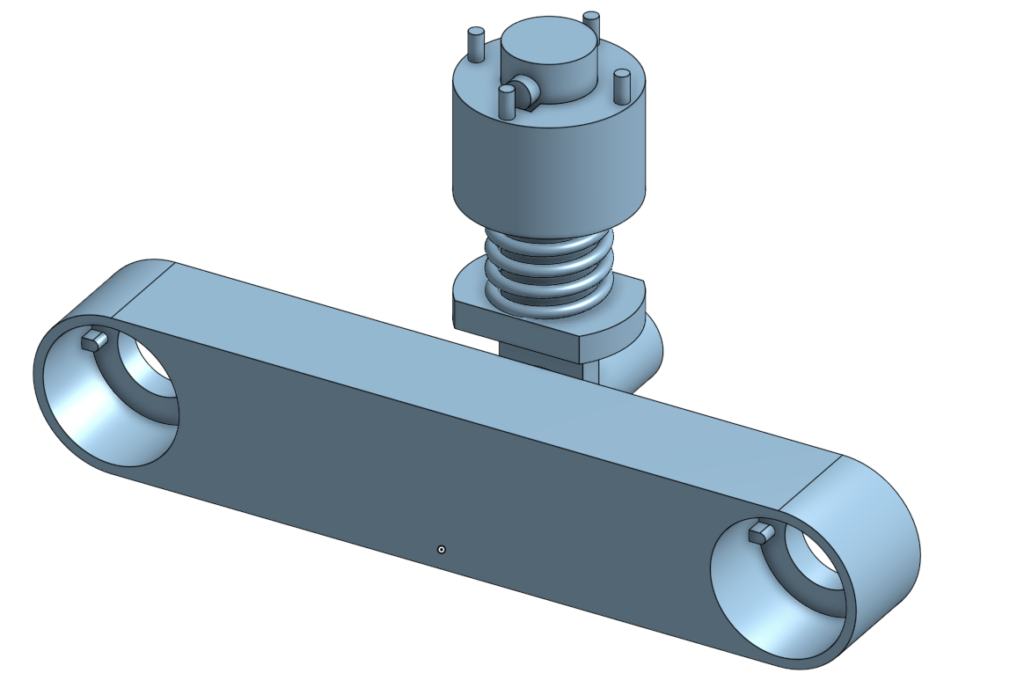
– A picture of the suspension with the two slots for motors on the two ends of the axle that it is connected to.
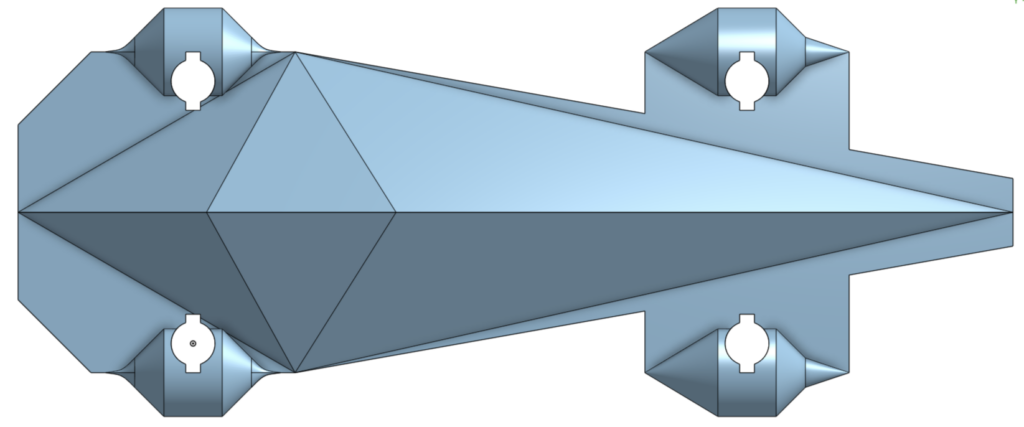
– The body of the vehicle’s top view, showing the four holes in the body of the vehicle that allow for more suspension travel distance.
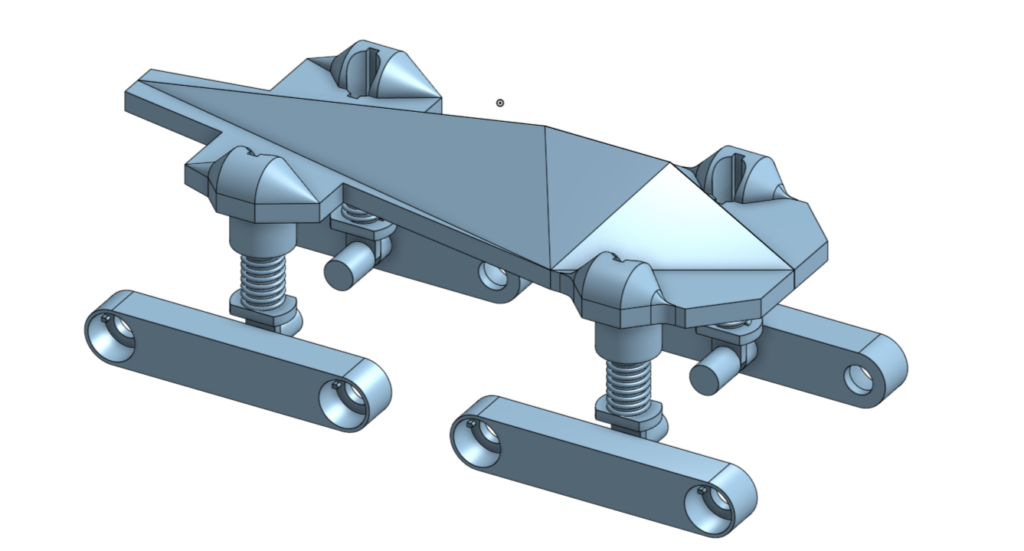
– The rover with fully extended suspension.
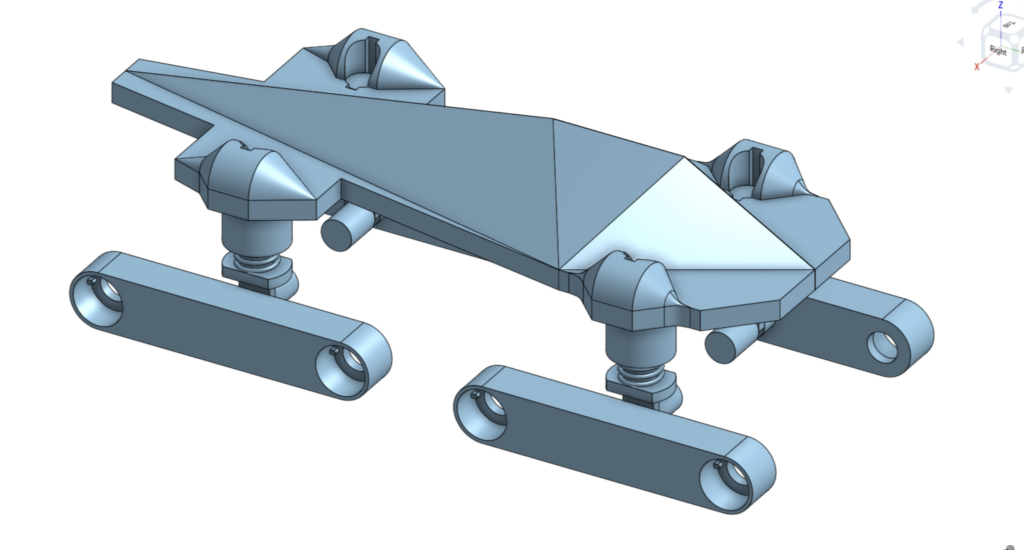
– The rover with compressed suspension.
We also made two prototypes for the wheels, one being with offroad treads and another with spikes to grab onto the icy surface on Enceladus.
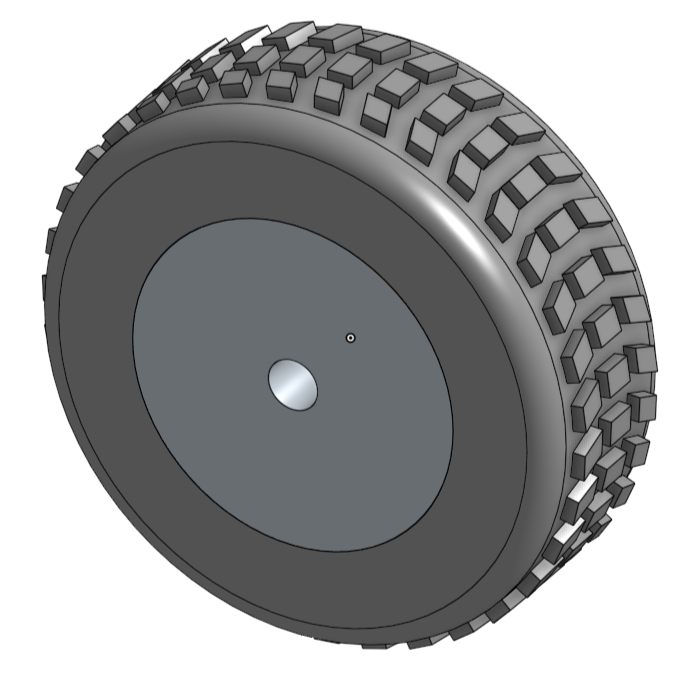
– A wheel with offroad tread, designed as a replica of offroad tires that work on Earth.
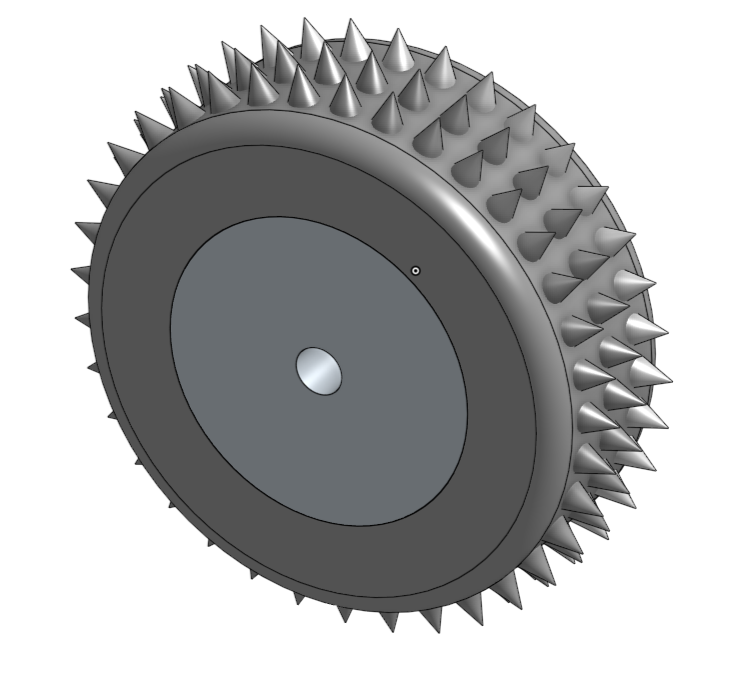
– A wheel with spikes that is designed to grip into the ice on Enceladus.
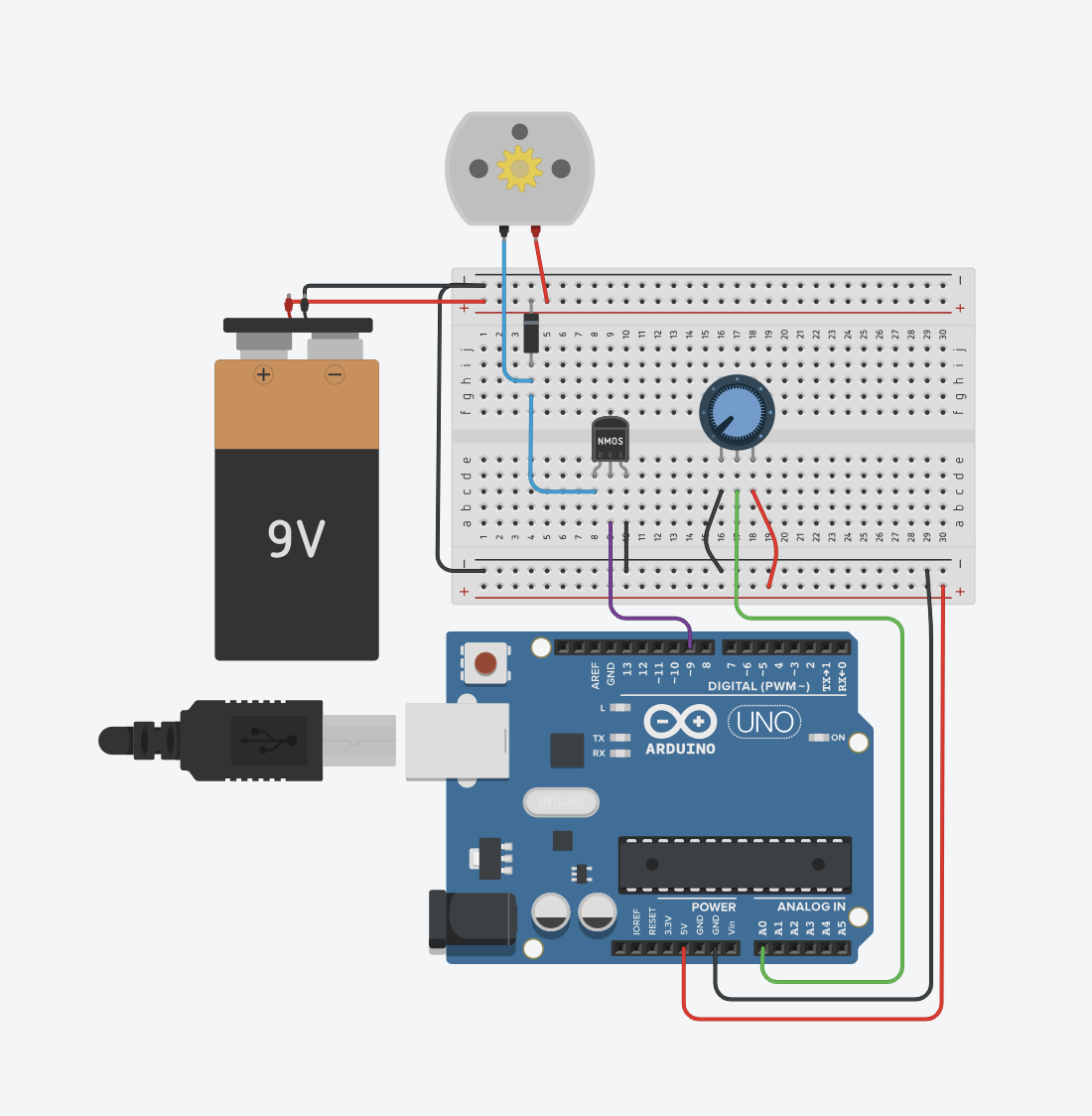
– The circuitry for each of the wheels, made in Tinker cad
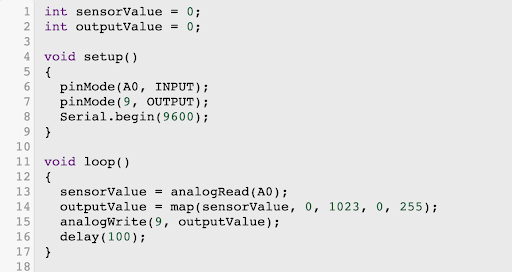
– The code used to control the speed of the motors based on an analog input, such as a potentiometer.

– The BOM chart of the prototype of the car.
Link to the mechanical drawings of all the parts: https://drive.google.com/drive/folders/1qMDOYICJ7f3-Pc2IWFoy-2NTsx3dYb5i?usp=drive_link
Tests – methodology
To continue, we will conduct several tests on the car to test its maneuverability on Enceladus like conditions and also measure its efficiency.
The first test’s objective is to test the handling of the vehicle on uneven, rough, and slippery terrain.
Materials needed:
- Vehicle
- Simulated surface
- Large surface as the testing area
- Aluminum foil or plastic wrap to mimic icy, slippery terrain
- Cooking oil could be added to increase difficulty
- Crumpled paper/rocks/blocks as obstacles for the vehicle
- Sandpaper to test the car against rough surfaces and tire wear
- Measurement tools
- Stop watch to time the vehicle on different tests
- Camera to record the performance of the vehicle with the environment
Procedure:
- Setting up the landscape
- Set down aluminum foil on a board
- Add obstacles such as paper or rocks to mimic Enceladus’s uneven surface
- Test runs
- Conduct multiple tests of the car on the constructed course
- Test the suspension of the car by observing how the suspension reacts to the obstacles
- Record observations
- Measure the time it takes for the vehicle to pass through the course
- Record the places where the rover is unable to cross
Analysis
- Completion time
- A faster time would indicate better performance and better handling
- Obstacle handling
- The amount of times the vehicle gets stuck on the test is indicative of its performance on rough and uneven terrain
The second test’s objective is to determine the energy efficiency of the vehicle and if it could operate purely on solar power
Materials needed:
- Light source
- A strong light source can be used to stimulate sunlight on Enceladus
- Terrain
- The same setup for the simulated terrain is reused
- Measurement tools
- Multimeter for current and voltage measurements of the solar panel’s output energy
- Payload
- Payloads can be used to measure the effect of additional weight on the energy consumption of the vehicle
Procedure:
- Setup terrain
- Same as previous test
- Simulate sunlight
- Turn on the light source at the start of the course to simulate sunlight
- Test the vehicle
- Start the vehicle at the start of the course and turn on the light source
- Attach small weights that simulate payload
- Repeat the steps and compare the performance change between them
Data Collection
- Energy generated
- Test the amount of energy generated during the run by timing the power output (watts) of the solar panel by the time used by the vehicle to traverse the course
- Distance traveled
- Measuring the length of the course
- Efficiency
- The efficiency of the vehicle can be calculated by dividing the amount of electricity depleted from the battery by the kinetic energy plus the total magnitude of the positive GPE changes.
Analysis:
- Effect of Payload
- How much does the payload effect the energy consumption of the vehicle; does it follow a linear trend or an exponential trend in relation to the total vehicle weight?
- Lighting
- Test the minimum amount of light intensity required for the vehicle to travel without the need of stored energy in its batteries
Conclusion
We used things such as “duck feet”, WRC rallying suspension, and race car setups as inspiration to create this project, designed using Onshape. After the prototype is finished, it will be put under tests to measure the maneuverability of the vehicle in rugged and uneven landscape and its efficiency as it travels through terrain.
Leave a Reply