In this project, we were tasked to create a vehicle that could navigate the exoplanet that was assigned to us. Regarding our group, we got Enceladus, an icy, sharp terrain with a freezing temperature. Due to the hazardous and ever moving surface terrain, we settled for a submarine vehicle, capable of traversing the water underneath the ice.
Definition Statement:
The 4 astronauts operating the vehicle need to be able to operate and traverse in cold underwater temperatures of -201.67 celsius, uneven terrain, keep stable in high pressure conditions, and stay energy efficient so the vehicle is able to travel at least 10 km at one filling of energy while not leaving a detrimental impact on the planet for future missions.
The test factor we chose was propulsion underwater. We connetion a fishing buoy to the body to track where it was underwater, as it would allow us to capture the speed and efficiency of the submarine with a stationary camera that wouldnt need to be submerged. During this experiment, we hoped to learn if our submarine would be able to propel itself without it floating.
Method
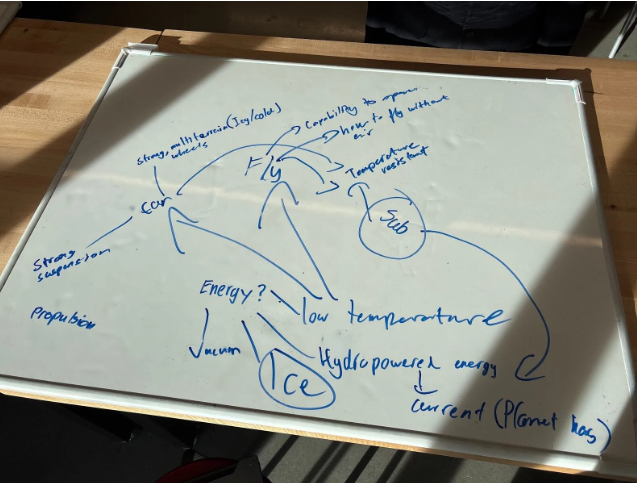
Our project brainstorming started with the plan of creating a submarine prototype. We used a whiteboard to visually represent the different ways we could prototype our vehicle as well as conditions and factors, with our final idea being a challenging conclusion of creating a submarine. We listed multiple precautions and dangers that came with this, unfortunately however, we did forget about buoyancy as a problem that would prove to be a issue.
Test 1
Our first test was quite uncessful, as our submarine, which mostly composed of 3D printed parts, was much too light to sink and would float to the surface, relating back to our prior mishap on buoyancy. However, our submarine was very watertight and did not let any water go through.
After learning the pros and cons of our design proceeding the first test, we redesigned our vehicle, our design consisting of a section in the submarine that would allow water to flow into our first layer. We hoped that would help increase the weight of the submarine, as our first design was much too buoyant and would float to the surface.
Design
Furthermore, we also built a separate container for electronics,
(shown below)
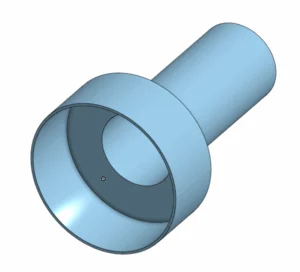
this section would be much more sealed and watertight as safety was one of our top priorities. Over the course of our tests so far, we also had some issues with friction, so we decided to get a new motor, as this motor had a much higher torque than our previous one. This would hopefully overcome our problem with the force of friction. To aid with this, we also purchased lower friction tape.
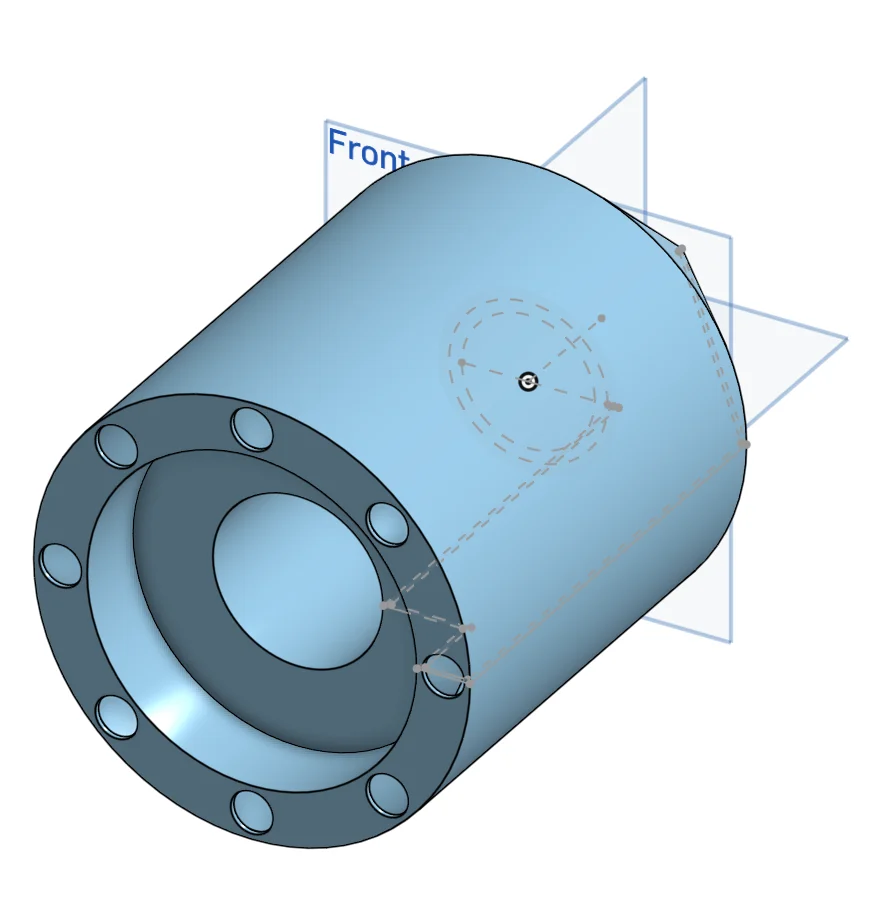
In the below images, we can see the device that we used to contain our magnets. This device would connect with our propeler outside, through a 3d printed wall,
(shown below)
removing the issue of water getting inside the submarine and getting into all the electronics. The two devices were connect through a strong magnetic pull, as one was connected to a rotating motor on the inside, providing the propulsion.
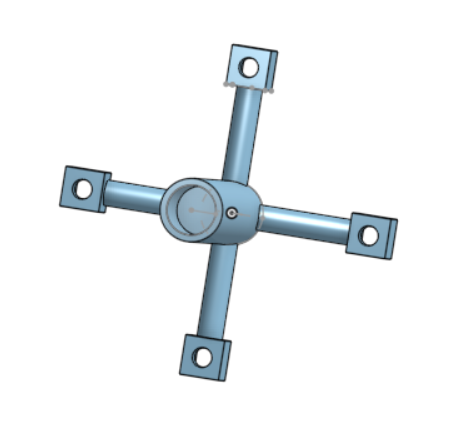
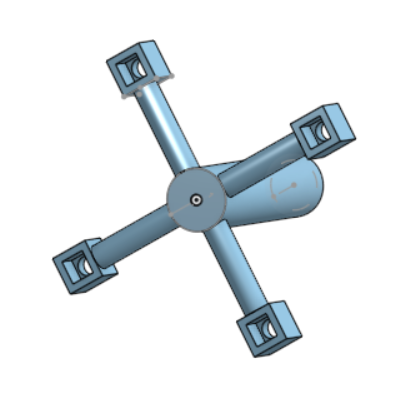
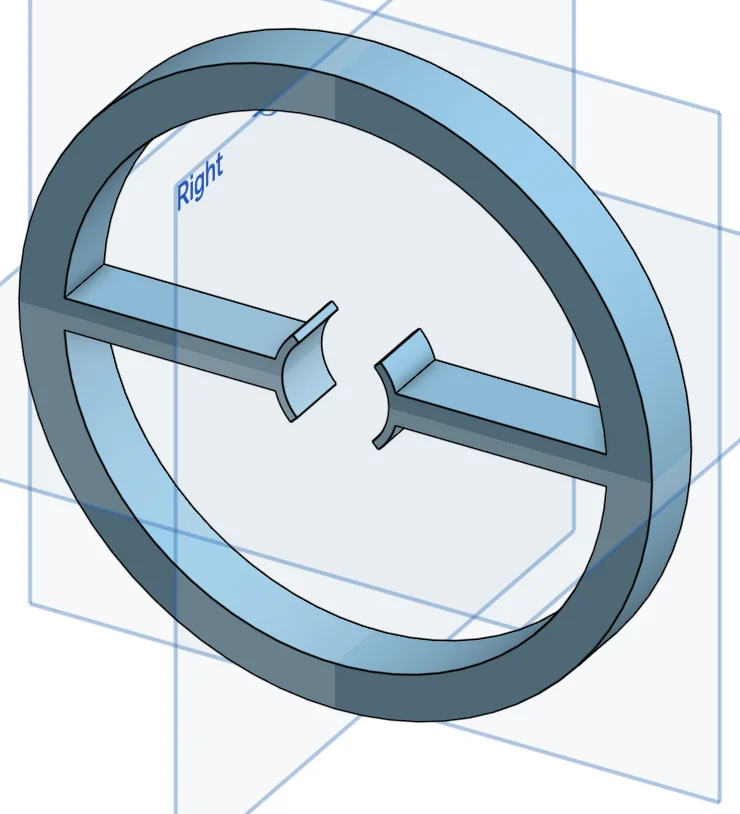
The propeller design we created is actually differently designed, as the circular shape and shape of the fans would create the least amount of water resistance while rotating in the water, causing the submarine to be propelled forward.
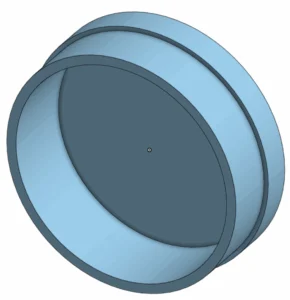
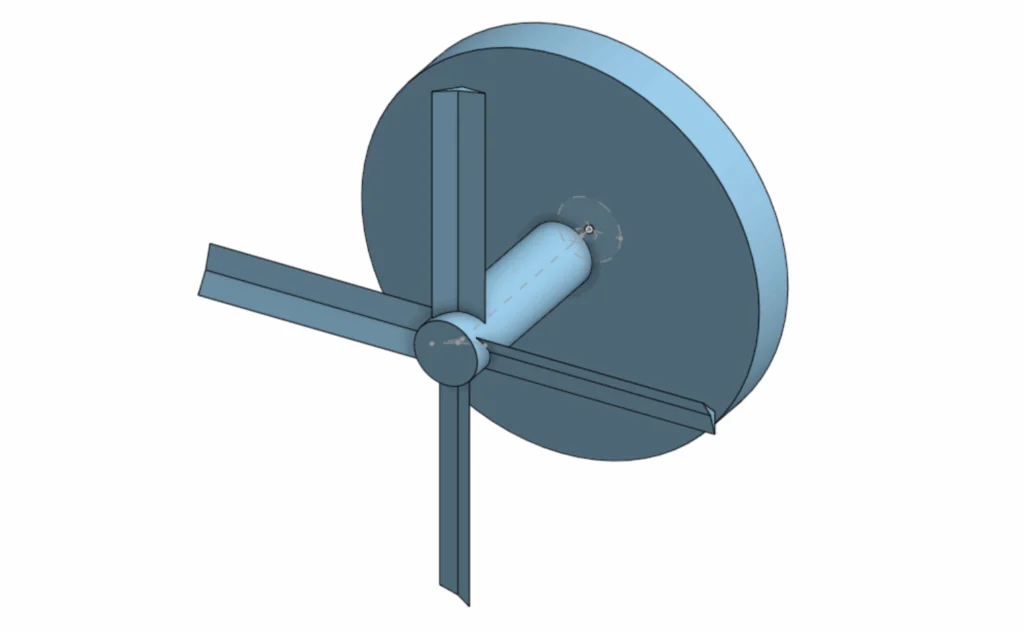
The figure beneath shows the device we designed to help us hold the motor in place, this absolved the worry that we had of the engine falling out of place mid test and not recieving power. As well as this, it also allowed for the motor to not move during a test and making the submarine drive out of line.
The context that has been written are thoughts prior to our test day. When testing the submarine, we were unable to get the engine inside the submarine to properly attatch to the external engine as the force of the motor was much too strong for the magnets we had to attatch and spin. Due to the fact that we could not get the magnets to connect, we were unable to create any propulsion for our submarine to calculate and measure. However, we did test our submarines buoyancy with our new designs
Final Test
During our testing period, we went for the straightforward way of putting our motor into the vehicle, which was opening the lid, putting the spinning motor onto the module, and then closing the lid, trying to get the propeller attatched to the still spinning magents on the inside. The problem hastingly occured to us that the motor was spinning much too fast, generating the predicament of having the two magnets connect to each other properly. In an attempt to get them to connect, we tried to slowly rotate the outside module in sync with the magnets inside even though we knew that it would be much too difficult to rotate it as fast as it was with the motor behind the wall. We also attempted to put the motor in while the lid was spinning in the middle of the two modules, failing as the hole created for the motor was too deep, making it very difficult to pull off as it would hit fingers going in at high speeds.
# two of our team members had already gotten their fingers injured due to this issue…
Eventually, the motor did slow down, and we were able to get the module on, but at that moment, the battery had died inside of our vehicle, meaning our test had failed.
After this immense fault in planning, we decided to at least test if our submarine had at least surpassed our previous issue of buoyancy with our new design. With the new design the submarine was still too buoyant, however, the submarine floated much more slowly, meaning our solution would hae worked if it was expanded more. After adding the weights, the submarine was able to fully sink to the bottom without a hitch, while sustaining the direction it was designed to face.
Data
Regrettably, our test had failed, as we were unable to measure any sort of propulsion or gather any info that was planned, with our definition statement being unmet. Our vehicle not moving meant that our energy efficiency was at 0%, with our input being 9V due to our battery.
Final Anaylsis
Despite our lack of data, we tried to make assumptions of the speed and information that we would’ve concluded with if our test had suceeded. The motor was undeniably strong enough, but would’ve conflicted with friction, causing it to slow down. The fans on the propeller were also not stable and strong enough, as the fragile 3d printed material would have fallen apart. We estimated the speed to be 1m per second.
Using these estimations, we were able to calculate the energy efficiency of our vehicle. With an input voltage of 9 V and an estimated current of 1 A, the system power was calculated to be 9 W. Furthermore, with the assumed speed of 1m/s, and a theorized travel distance of 15-20m, the total moving time would have been around 15-20 seconds. This would result in a estimated energy input of 135J – 180J. Nonetheless, due to the several factors of water resistance, internal friction, and inefficiencies in the motor, only a partial amount of this energy would be converted into useful mechanical motion. Assuming an overall system efficiency of approximately 15%, the available mechanical energy would be in the range of 20–27 J. This evaluation tells us that while the theoretical energy supply may have been enough shorter distanced lengths, inefficiencies in propulsion and power conversion likely would prevent an effective forward motion during testing.

Conclusion
Ultimately, we were able to draw data from our test, and we tried our best to create a vehicle prototype despite the challenges we knew we would face. If I had another chance to design a similar vehicle, I would make sure that the innermost chamber was fully watertight. As well as this, I would also assure that we would always have full access to our electronics, this is due to the fact that when we lost access to our internal electronics before we could attach the outer engines. As well as this, since we were unable to make our submarine sink properly without added weights, I would’ve used a different material, as the thermoplastics were much too lightweight. Finally, I would’ve brainstormed much more at the very start, a consensus we all agreed on post test. Due to the lack of ideas, we had to pick an idea that was much too complicated and provided too many factors that would be difficult to overcome considering our time constraints and limited expirience. I believe these are all factors that contributed to the failed submarine of our planetary project 2.
AI Transparency Statement:
Ai was not used in our project.
If there was any use of AI, I am not aware of it.
Leave a Reply