Introduction
Our initial goal was to test the ability of our vehicle to traverse rough and rocky terrain while staying true to it’s pre-coded path. However, we ran into a couple major issues.
Original CAD Design
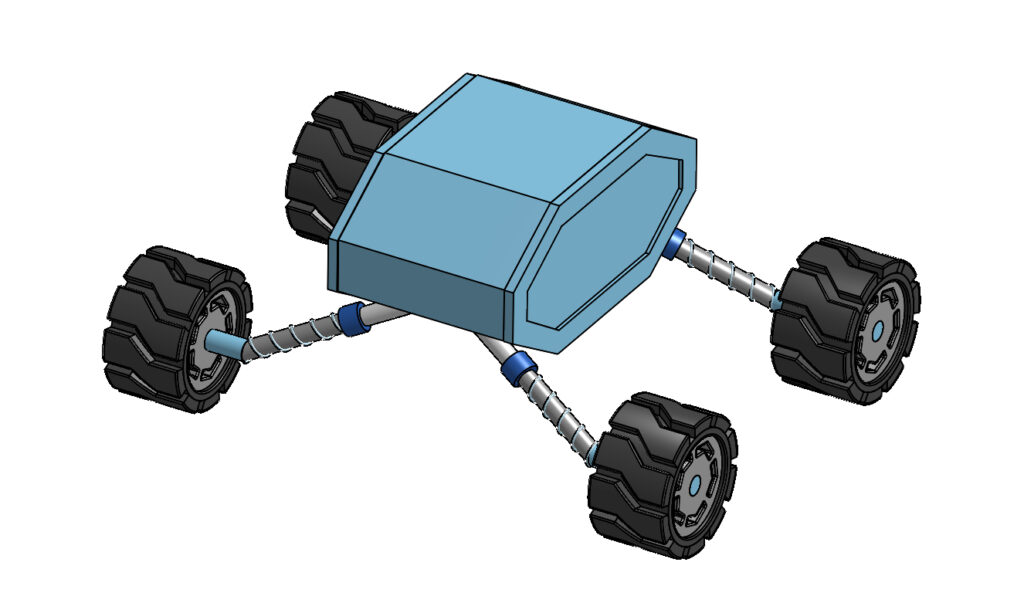
This was our original design. We intended to use springs and a piston mechanism to create suspension. However, this proved to be very difficult, and we ended up making thick tires instead.
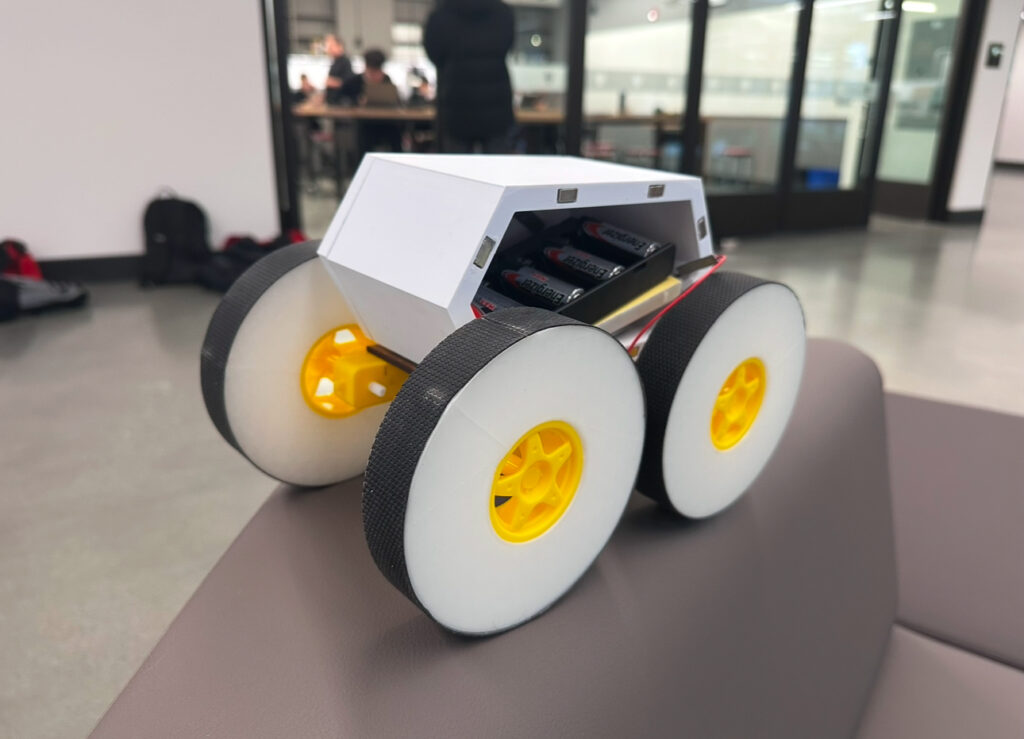
Final Design
This is our final design. Some significant changes include the removal of the suspension system, and the addition of much larger tires that would somewhat act as cushioning against large rocks. However, we ran into the issue of the tires being a little stiff, so there wasn’t much cushioning.
Test Procedure
Due to some unforeseen problems, we were unable to test our vehicle’s ability to traverse rough terrain. However, we were still able to carry out an incline test comparing our wheels to standard wheels.
First, a wooden board was propped against a set of stairs, and the angle was measured. For the purposes of this test, we increased the angles by increments of 5 degrees, starting at 10 degrees.
Next, we drove our vehicle up the slope twice, once with regular wheels, and once with wheels we made. We recorded results by measuring how long it took to drive up each incline, and rounded to the nearest .5 seconds for easier calculations.
Test Data
| Incline: | Time (Big Wheels) | Time (Small Wheels) |
| 10° | 1.5 | 1.5 |
| 15° | 1.5 | 1.5 |
| 20° | 2.0 | 1.5 |
| 25° | 2.5 | 2.0 |
| 30° | 3.0 | 2.0 |
| 35° | Fail | 3.0 |
| 40° | Fail | Fail |
Analysis
Energy Output Equation
Eout=mgh=m(g)(dsinθ)
m=1.0 kg for big wheels
m=0.8 kg for small wheels
g=9.81 m/s²
d=1.5 (board length)
sinθ calculated per incline
Eout=m(g)(1.5sinθ)
| Incline (θ) | Vertical Height h (m) | Eout (Big Wheels, 1kg) (J) | Eout (Small Wheels, 0.8kg) (J) |
| 10° | 0.26 | 1.0×9.81×0.26 =2.55 | 0.8×9.81×0.26 =2.04 |
| 15° | 0.39 | 3.83 | 3.06 |
| 20° | 0.51 | 5 | 4 |
| 25° | 0.63 | 6.18 | 4.94 |
| 30° | 0.75 | 7.36 | 5.89 |
| 35° | 0.86 | (Failed) | 6.76 |
| 40° | 0.97 | (Failed) | (Failed) |
Energy Input Equation
Ein=P×t=V×I×t
V=12V, I=0.8A → P=9.6W
Ein=9.6W×t
| Incline (θ) | Ein (Big Wheels) (J) | Ein (Small Wheels) (J) |
| 10° | 9.6×1.5 =14.4 | 9.6×1.5 =14.4 |
| 15° | 14.4 | 14.4 |
| 20° | 19.2 | 14.4 |
| 25° | 24 | 19.2 |
| 30° | 28.8 | 19.2 |
| 35° | N/A | 28.8 |
| 40° | N/A | N/A |
Efficiency Equation
η=(Eout/Ein)×100%
| Incline (θ) | Efficiency (Big Wheels) (%) | Efficiency (Small Wheels) (%) |
| 10° | (2.55/14.4)×100 =17.7% | (2.04/14.4)×100 =14.2% |
| 15° | 26.60% | 21.20% |
| 20° | 26.00% | 27.80% |
| 25° | 25.80% | 25.70% |
| 30° | 25.60% | 30.70% |
| 35° | Failed | 23.50% |
| 40° | Failed | Failed |
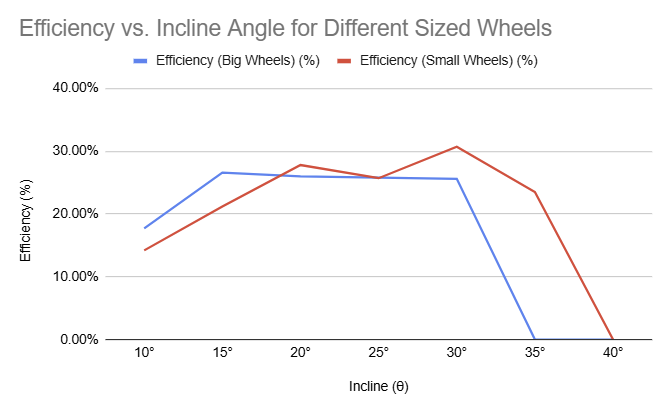
Our data provided us with an interesting result. Apart from a couple examples, small wheels tended to keep up with, if not outperform our large wheels, especially as we raised the incline. Our main hypothesis behind these results is that it was caused by the difference in center of mass. With large tires, the chassis was greatly elevated, and thus the center of mass was higher up. However, small wheels allowed the chassis to stay close to the ground, which lowered the center of mass.
Having a lower center of mass allows objects to more easily balance. Think of it like this: you have two 5kg cubes. One is just a cube, and one is on a pole. When both are placed on a surface with no incline, both are able to stand still. However, when that incline is raised to 5°, you will notice the cube on a pole becoming more unstable, and possibly even falling. As you raise the incline more and more, the cube on a pole will fall first. This works in a similar way to our vehicle, where the center of mass is placed higher up on an object, thus causing said object to be harder to balance.
Because of the difference in center of mass, our vehicle needed less force to move up the incline when on small wheels, due to the chassis being closer to the ground. Therefore, with the same amount of power going to the motors, it was generally able to move faster compared to the large wheels.
Conclusion and Design Improvements
In conclusion, while our wheels didn’t actually perform better than the stock small wheels, we learned some valuable information that could be implemented if we ever made a second version. First, having smaller, grippier wheels would be much more effective at traveling up steep terrain compared to large, tall wheels. This is due to the lower center of mass that small wheels give the car.
Therefore, given more time, I would choose to go with the idea of making suspension instead of large tires. Suspension would allow individual wheels to move up or down, leading to a smoother drive, and would also give me the ability to lower the vehicle closer to the ground when climbing steep angles. I would likely choose to make the suspension with a spring mechanism rather than magnets, as that would allow me to choose the exact force needed for a wheel to move up or down.
Furthermore, another issue we ran into was how cramped the space we made inside the vehicle was. We had to kind of cram everything into the space available, which was a likely cause for the issues we had with the motor controller, which forced us to have to change from a pre-coded path test to an angle test. What most likely happened was that the motor controller’s wires probably came in contact with other wires, causing the entire thing to short circuit and stop working. If we were to make another version, I would choose to make the chassis significantly wider and longer, while making it shorter. This way, all the electronics could be placed next to each other, and expanding the chassis along its’ width instead of height would preserve the low center of mass it has with smaller tires.
Usefulness
Although our vehicle might be pretty rough around the edges, it does have several uses on Ceres. With its’ large tires, our vehicle should be able to traverse terrain with loose rock easier, as it wouldn’t get stuck in the gaps as easily as small wheels. Furthermore, the raised chassis prevents the bottom of our vehicle from being scratched by sharp rocks under the vehicle that small tires wouldn’t be able to prevent the vehicle from scraping. All in all, these tests proved useful in giving us insight towards the weaknesses of our vehicle, and possible improvements for it in the future.
AI Disclosure Statement
AI was used to calculate the efficiency after plugging in test data. All text is human generated.
Leave a Reply