Recap
The issue I’m trying to fix is within remote controlled cars they have several intentional inefficiencies in their drivetrains and motor setups for cost savings. More specifically, these problems stem from three main issues: fixed gear ratios that don’t adapt to changes in speed causing bottlenecked motors that can’t operate optimally across all conditions. And poor acceleration dynamics, issues that cause consumer grade RC cars to feel slow while professional examples often cost as much as a really cheap real car.
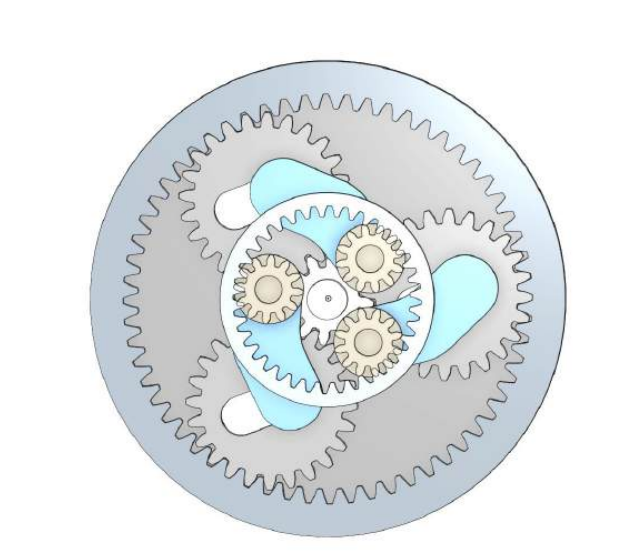
To solve this, I designed a gear system that acts like a Continuously Variable Transmission often found on economy cars. This system allows the gear ratio to shift smoothly from 2.8 down to as low as 0.4.
Updates
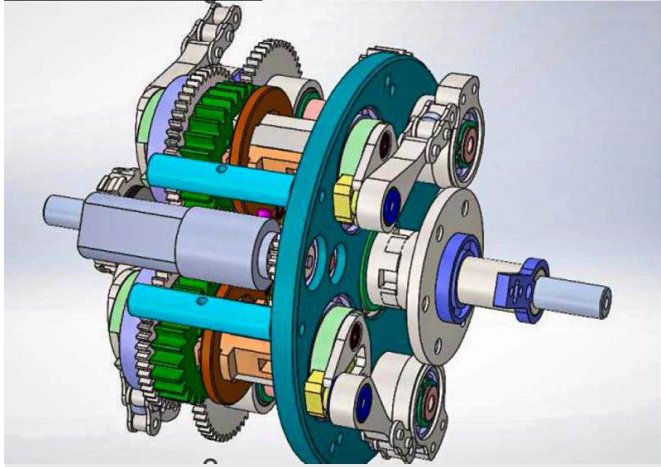
Currently, I have prototype designed and 3D printed that demonstrates the effects of the concepts of the transmission. My current prototype is twice the size of the intended final product; this aids in construction and demonstration of the gear ratios changing over time. Some challenges that I’ve had mainly stem from the construction aspects as 3D printing anything that requires tight tolerances always causes some problems due to inaccuracy. However, I have learned to overcome this by including extra spaces in CAD where two parts need to fit together. Next steps would be a “good” version of my prototype most likely made of CNC’d metal but still at the same scale, in this prototype I would add electronics and test with a high power motor.
Leave a Reply