Design Proposal:
“Our mission is to design a human operable transportation vehicle capable of a reliable 10-kilometer round-trip journey. This vehicle will navigate Titan’s dense atmosphere – 50% more than earth’s – and surface gravity of 1.35 m/s² efficiently, allowing for stable travel to and from an assumed habitat. By using Titan’s natural resources for fuel, the vehicle will operate sustainably, maximizing range in this extraterrestrial environment.”
Ideation Phase
During the Ideation phase, our team created a bunch of designs that could fulfill our definition statement. Below is a list of ideas we thought could have worked:
- Catapult – Wasn’t good because the group cannot return, also unsafe
- Jetpack – Exposes group to the elements requires complex construction
- Angry Birds slingshot – Worse version of Catapult
- Spider-crawling vehicle with legs – Complex but otherwise fine
- Hover drone – Pretty good but slow
- Jet plane – Good but can’t hover over one spot & not very maneuverable
- Rocketship – Same as Jet plane
- Ice drill-powered propulsion – Inefficient and affects terrain to much
- Magnetic rail train – Inefficient and would take a long time to setup
- Compressed gas propulsion pack – Same as Jetpack except complex construction
Reflecting
Reflecting upon this list we found many problems with the majority of this list; whether it be inefficiency or a difficulty returning to our hypothetical habitat. We found a couple of great ideas numbers 4, 5, and 7. But for various reasons we settled on a drone design due to it’s relative simplicity, stability, and maneuverability. Some observations we made about our problem is that not many vehicles that are good in many categories are efficient because of their jack-of-all-trades nature. However, our solution is one of the few exceptions to this rule.

(This image was generated by AI)
Testing Statement (How and what we’re gonna test)
The hover drone prototype is designed to test the feasibility of aerial mobility relevant to Titan-like conditions. Specifically, this prototype shall be used to evaluate a drone’s efficient lift-off, sustaining controlled flight, and making a 10 km round trip, bound to constraints similar to the low gravity and dense atmosphere of Titan. It shall also assess stability in simulated wind conditions and energy efficiency for longer distance travel.
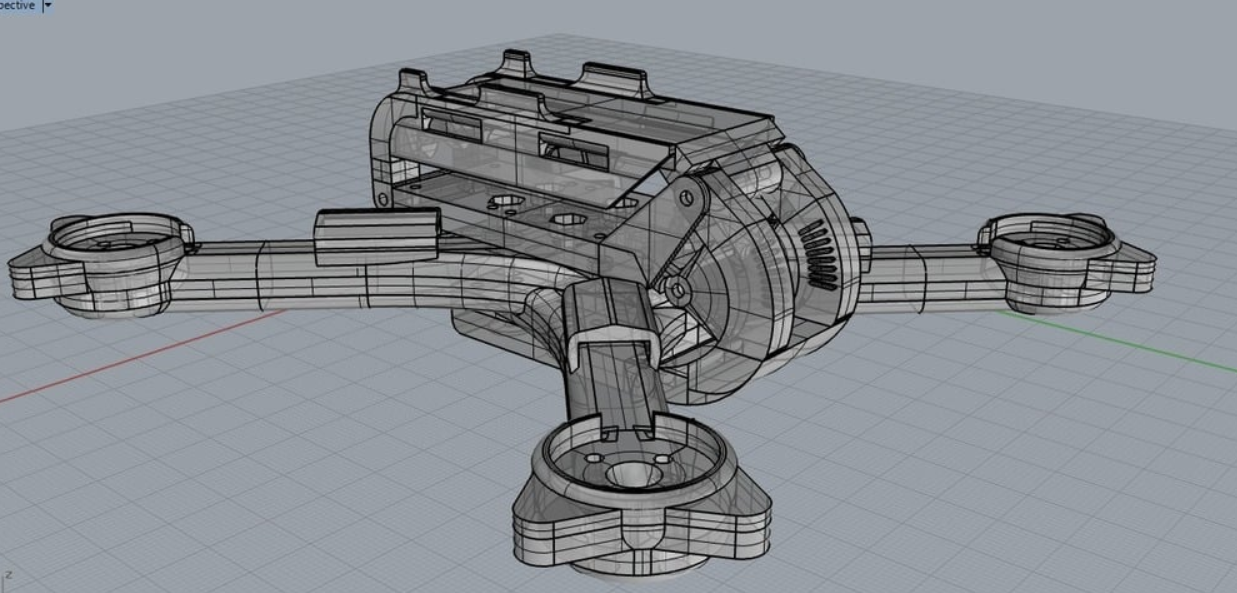
Final Design and Mechanical Drawing w/BOM
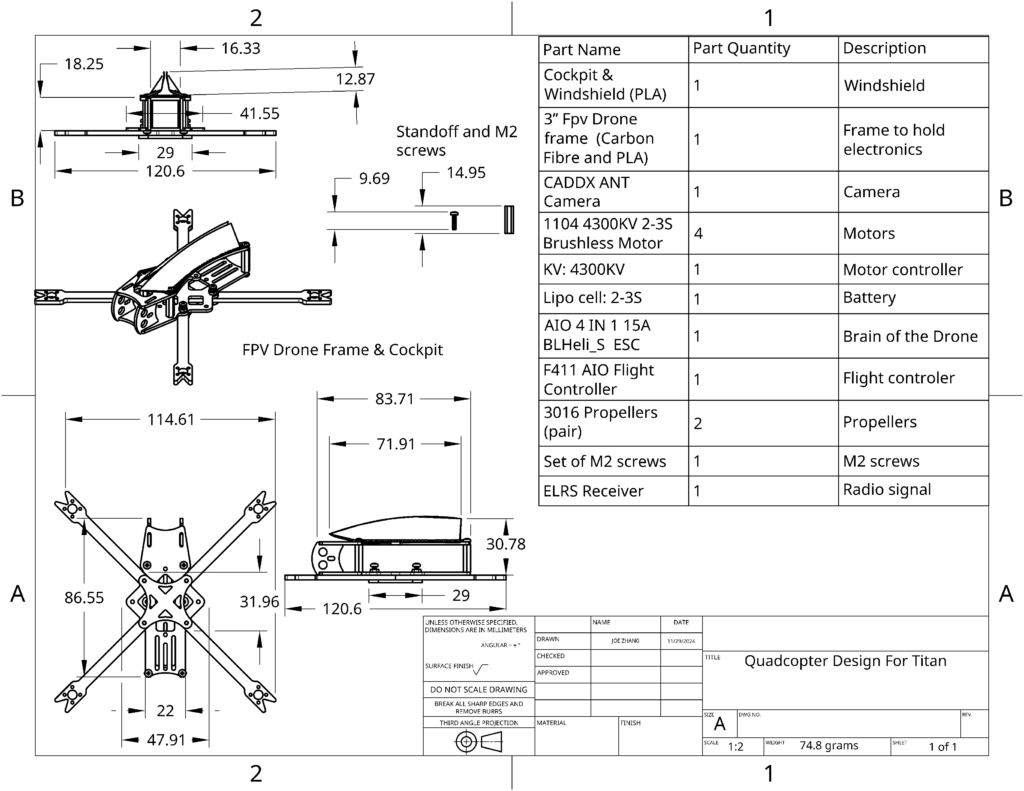
We created this model and BOM for the cheapest FPV drone that we could build while maintaining the important aspects of testing. With the total cost adding up to just over $100 CAD.
(This image was generated by AI)
How we’re gonna test
We intend to test the efficiency and maneuverability of the drone by performing smaller scale experiments on Earth and mathematically adjusting the results to account for Titan’s conditions, such as low gravity and a dense atmosphere.
Efficiency testing procedure
- Do the Earth test: Do a flight over a course that can divide 10km easily, such as 100m, with or without added weight to simulate payload. Measure the energy consumed during the flight, recording values like battery percentage drop. Use these measurements as the baseline for Earth conditions.
- Do the adjustment for Titan’s gravity: Gravity on Titan is 1/7th that of Earth’s and requires much less energy to lift payloads. To simulate this we will divide energy use associated with lifting by 7
- Correct for dense atmosphere: The atmosphere on Titan is roughly 4 times denser than that of Earth, and thus flight in the horizontal plane can be far more efficient. To model this added efficiency, we’ll divide energy use related to horizontal flight by 4
- Determine adjusted efficiency: Efficiency will be calculated as: Adjusted energy consumption will include the reduced lift energy and horizontal flight energy based on Titan’s conditions 6. Multiply and extrapolate Using the scaled test results, we will extrapolate to the full 10 km round trip required on Titan. We can simply just multiply the Titan-adjusted efficiency by the actual distance (10,000 meters) to estimate total energy requirements.
Maneuverability testing procedure
- We will create a obstacle course to test maneuverability and see how fast our design can make it through.
- To add the conditions that our drone will be affected by on Titan we can add artificial wind and debris to help disrupt the drone’s flying. Adding an increased amount of challenge for the drone.
Leave a Reply