Hello all! This is a continuation of the Enceladus project, where my team—Roy Zeng, Joshua Chen and me—will be simulating a trip to Enceladus for scientific purposes. This blog post will outline our ideation and prototyping process to solve our problem statement.
A team of astronauts must travel 10 kilometers on Enceladus safely while combatting the icy temperatures and brightness-induced low visibility. They must also avoid geysers of water vapour and the possibility of escaping from Enceladus’s gravity pull.
Ideation
During our ideation phase, we brainstormed many different potential solutions—both good and bad—to address the obstacles posed by Enceladus. These solutions include:
- Duck feet
- Hovercraft
- Spiky Wheels
- Tank Wheels
- Catapult
- Human Labor (swimming, running, etc.)
- Penguin Belly Sliding
- Flamethrowers
- Ice Skates
- Air Bubbles
- Star Wars Ice Crawlers
- Star Wars Death Star
- Cosmic Energy Harvester
- Spider Bots
- Jetpacks
- Self-heating Sleds
- Range Rovers
- Cable Cars
- Ice Plows
- Nuclear Power
- Hydro Power
- Solar Power
Most of these ideas were formed during a “worst ideas” challenge. Therefore, most of these ideas got abandoned pretty quickly. Although some of them seemed to be horrible choices at the time, they proved to be the stepping stone for our rover prototype.
One undisputed idea was the usage of spiky wheels because they would be an optimal choice on the icy surface of Enceladus. The spikes provide extra grip, preventing slippage on smooth or sloped surfaces, and can pierce through loose ice or snow for added stability. Combined with a durable and flexible suspension system, spiky wheels would allow vehicles to traverse areas like fissures easily.


We also liked the idea of tank mobility as it can help navigate the difficult terrain on Enceladus. Tanks use a track to spread the weight evenly to prevent the vehicle from sinking into the ground. This is the opposite of what we want, so we altered our design to contain spiky wheels to help us stay on the ground despite the low gravity.
We also decided to use solar power despite being the worst in the context of Enceladus. Solar power is easily accessible in a Grade 10 classroom and requires less space, unlike nuclear power and hydro power.

Prototype
The purpose of the prototype is to assess the ability of our vehicle to travel through the rugged and icy landscape on Enceladus, while also testing the efficiency and the suspension system of the vehicle.
Main Frame and Wheels


The vehicle is equipped with eight wheels, with each wheel connected to individual servos that fit into specific slots on the vehicle. There are 8 wheels in total: 2 pairs of wheels on each side. Each pair is linked together via an axle, and this axle is attached to a suspension that provides cushioning for the vehicle. The suspension consists of a single spring positioned in the center of the axle, which is held in place by a locking mechanism to prevent the spring from detaching. This also ensures that the axle remains stable without undesired horizontal rotation. As explained before, the wheels are equipped with spikes, which will help the vehicle grip onto the icy terrain. Our design also needs add-ons like solar panels, motors, and more.
Motors
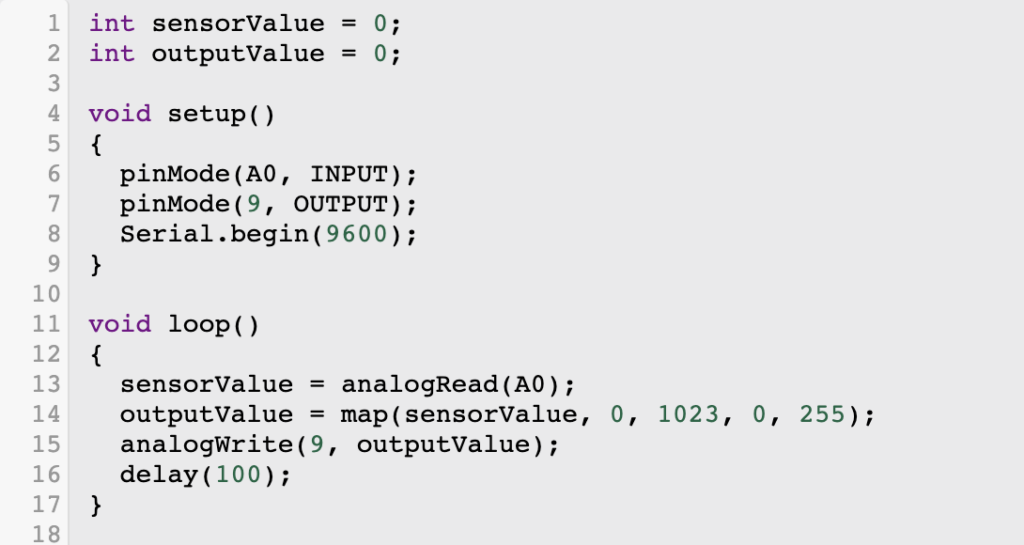
Motors are an essential part to actually making the vehicle move. I have created a basic arduino motor design on TinkerCAD. However, there are multiple problems our team needs to face. Firstly, we need to somehow fit an Arduino UNO and breadboard on our vehicle. Secondly, we also need to use solar power instead of a 9V battery for one of our tests.

Testing Methodology (reasonable for Gr.10)
Test 1: Evaluate how effectively a vehicle’s suspension system handles a terrain resembling Enceladus’s icy surface.
1. Materials Needed
- Vehicle: 3D printed prototype with motors
- Simulated Surface:
- large tray/board
- plastic wrap with oil to mimic icy/slippery conditions
- small rocks to create obstacles
- Measurement Tools:
- stopwatch to track vehicle performance/speed
- camera to record vehicle/environmental interaction
2. Procedure
Setting up:
- Create the simulated icy surface by covering the tray/board with aluminum foil or plastic wrap.
- Add small rocks beneath the plastic wrap to create an uneven surface.
- Place additional obstacles on top to further simulate Enceladus’s terrain.
Test Runs:
- Drive the vehicle through the course multiple times.
- Observe how the suspension system reacts to bumps, slopes, and obstacles.
Record Observations:
- the time for the vehicle to do the course.
- areas of concern where the vehicle struggles/gets stuck
3. Analysis
- Shorter times suggest better suspension performance and smoother navigation. Longer times suggest the opposite.
Test 2: Assess the energy efficiency of the vehicle by quantifying its performance the terrain using only solar-generated power.
1. Materials Needed
- Light Source:
- strong desk lamp, LED spotlight, or flashlight to simulate sunlight. Multiple sources can be used to vary intensity of light.
- Vehicle:
- 3D printed prototype with motors
- small weights to simulate payload
- Terrain: same setup as the mobility test
- Measurement Tools: multimeter to measure voltage and current generated by the solar panel
2. Procedure
Setting Up:
- Reuse the terrain setup from the mobility test.
- Place the light source(s) above the solar panels to simulate sunlight exposure.
Test the Vehicle:
- Start the vehicle at the beginning of the course and turn on the light source.
- Drive the vehicle through the course.
- Repeat Step 2 but with different variables(light intensity/weight added).
3. Data Collection
- Measure the total energy generated by the solar panel during the run.
- Example: If the panel produces 1.2 W and the vehicle runs for 5 minutes (300 seconds), the total energy is 1.2 × 300 = 360 Joules.
- Measure the total distance the vehicle covers during the course.
- Calculate energy efficiency: Efficiency% = (Work Done/Input Energy) × 100
4. Analysis
- Observe where and when the vehicle consumes more/less energy.
- Compare energy consumption with and without additional weight.
- Determine the minimum light intensity required for efficient movement and whether it is possible on Enceladus.
Summary
Both tests focus on the vehicle’s design and performance, making them well-suited for Grade 10 students like us. These experiments allow us to focus on improving the design itself in CAD and Arduino without needing access to expensive materials. While the tests try to simulate Enceladus’ conditions, factors such as temperature and cosmic radiation are impossible to recreate in the classroom. As such, our team will strive to improve the vehicle and hopefully conduct an experiment in more realistic conditions later.
AI was used in this blog post: TRANSCRIPT
Leave a Reply