Welcome to the third and last part of the Planet Exploration Project.
Again, this is our team’s definition statement:
Our mission is to design a human-operable transportation vehicle capable of a reliable 10-kilometer round-trip journey. This vehicle will navigate Titan’s dense atmosphere – 50% more than Earth’s – and surface gravity of 1.35 m/s² efficiently, allowing for stable travel to and from an assumed habitat. By using Titan’s natural resources for fuel, the vehicle will operate sustainably, maximizing range in this extraterrestrial environment.

We decided to make a quadcopter which can exploit the dense atmosphere and methane lakes. This statement is what the prototype is intended to test:
The hover drone prototype is designed to test the feasibility of aerial mobility relevant to Titan-like conditions. Specifically, this prototype shall be used to evaluate a drone’s efficient lift-off, sustaining controlled flight, and making a 10 km round-trip, bound to constraints similar to the low gravity and dense atmosphere of Titan. It shall also assess stability in simulated wind conditions and energy efficiency for longer distance travel.
And this is the test procedure:
We intend to test the efficiency and effectiveness of the drone by performing smaller scale experiments on Earth and mathematically adjusting the results to account for Titan’s conditions, such as lower gravity and a denser atmosphere.
Here is the post where I go into more detail about the tests. With all that said, let’s get into it.
Final Solution
The final version of the vehicle would be another drone with a similar weight as after our group leader, Joe, worked on it over the break, the battery was fried and the original 3D-printed frame broke so we had to construct a replacement out of popsicle sticks. Even after these setbacks, we still had more roadblocks as the motors were improperly calibrated, the soldering was bad, and the drone was unable to fly in the end.
My team decided to scrap the original drone in the end and borrow a teacher’s working drone of similar weight and size to conduct the tests. We also borrowed a pair of DJI goggles, which was useful as we could see the battery’s voltage in the display.
The Vehicle
Our vehicle takes the form of a quadcopter drone which can exploit the aerial mobility of Titan. It has a wooden frame built from popsicle sticks and 4 propellers. It has a radio transmitter for communicating to the controller and a flight control board.
The second drone we used was similar but it had a plastic frame and an FPV camera so that it could be used with the DJI googles.
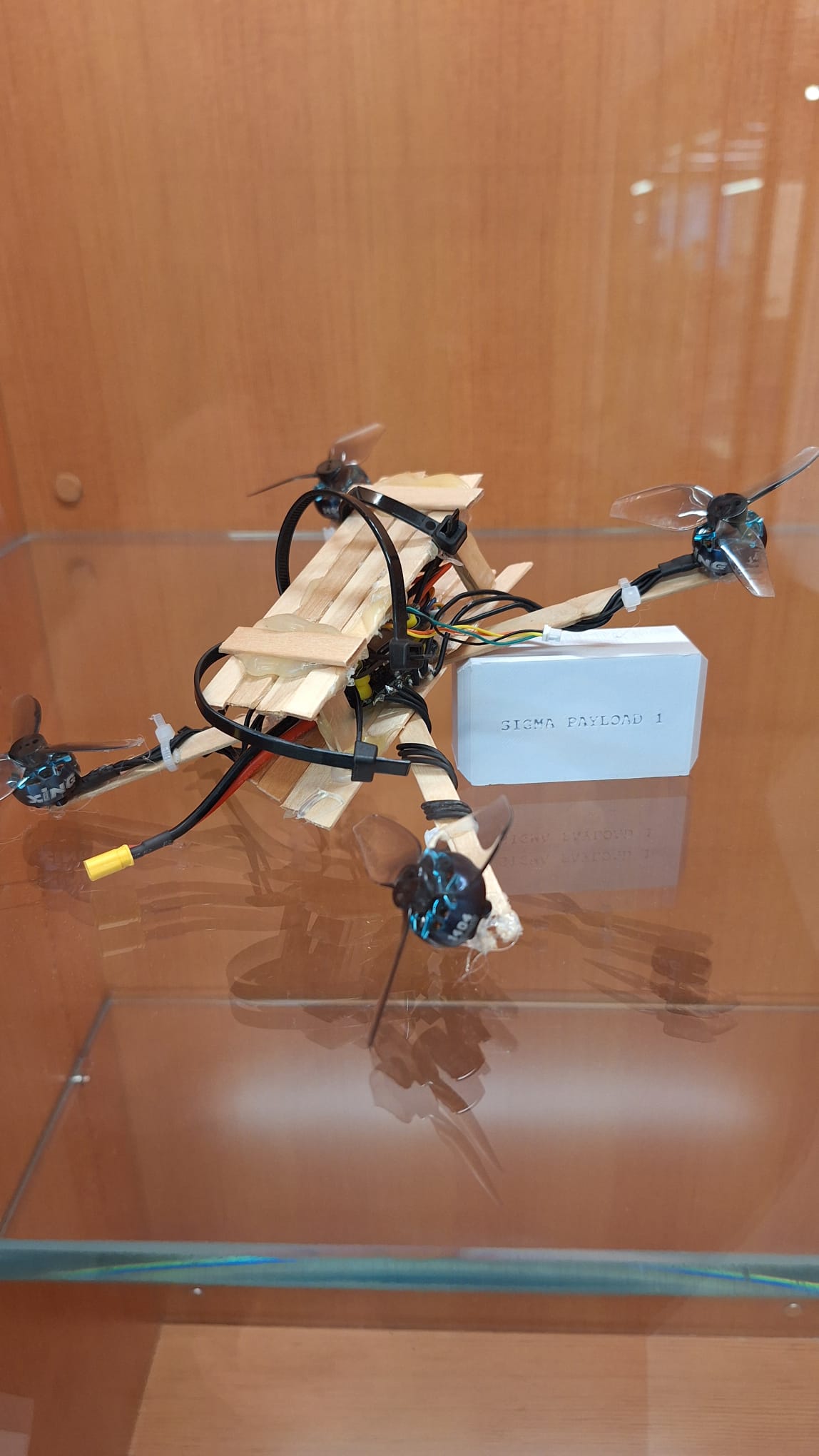
The first drone, without its battery.
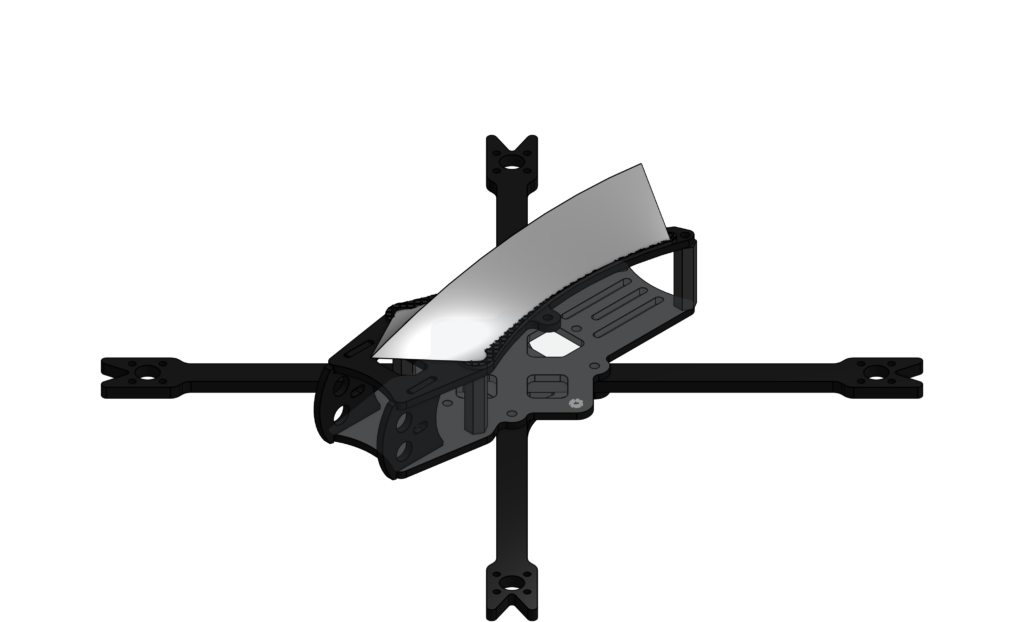
The original CAD drone model. Note the propeller holes and decorative cover that are present in this prototype design.

The second and final drone we used for the test.
The Test
Procedure:
250g drone
DJI FPV goggles
Radio drone controller
100m field
Pre-measured load that accurately scales to passenger weight (60g)
Preparation:
- Record initial battery voltage
- Measure testing area (around 100m)
Test 1: Straight Flight
- Fly the drone in a straight line to and back, maintaining a steady height
- Measure the battery’s final voltage and initial voltage after landing for the next test
- Repeat 3 times
Test 2: Zigzag Path with Load
- Fly the drone in a zigzag path along with the load to simulate realistic movement and conditions
- Measure the battery’s final voltage and initial voltage after landing for the next text
- Repeat 3 times
Data Collection:
For the data, we used voltage per cell (V/PC) as a unit of usage. The table shows the V/PC at the start and at the end of each test, as well as the voltage decrease.
| Test Type | V/PC at start | V/PC at end | Voltage Decrease |
| NL Straight 1 | 4.16 | 3.91 | 0.25 |
| NL Straight 2 | 4.08 | 3.86 | 0.22 |
| NL Straight 3 | 3.78 | 3.7 | 0.08 |
| L ZZ 1 | 3.91 | 3.6 | 0.31 |
| L ZZ 2 | 3.65 | 3.45 | 0.2 |
| L ZZ 3 | 3.55 | 3.37 | 0.18 |
NL Straight = No Load Straight
L ZZ = Load with Zigzag
Data Analysis:
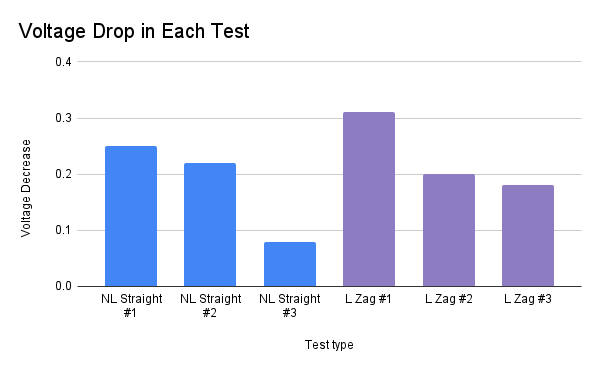
Data chart for both tests
The data we gathered showed that the voltage decrease between each test was lowered slightly. This may be because for the first test of each, the drone was on the ground and needed more energy to lift off of the ground where the successive tests didn’t as we didn’t land the drone.
Defining Efficiency:
We define our efficiency as V/PC per meter flown. Below is our efficiency formula:
Where ΔV is V/PC (Volts), and D is the total flight distance (Meters). The efficiency is higher the lower the value.
Calculations:
To get efficiency, we must find ΔV for both tests.

ΔV for NL Straight:
≈ 0.183 V (cor. to 3 d.p.)
ΔV for L ZZ:
≈ 0.23 V (cor. to 3 d.p.)
As the total length of the field is around 110m, we can calculate the efficiency by:
NL Straight:
≈ 0.000167 V/m (cor. to 7 d.p.)
L ZZ:

≈ 0.002091 V/m (cor. to 6 d.p.)
With this, we can see that L ZZ has a lower efficiency as carrying a load and making turns while flying increases energy consumption.
Scaling to realistic and Titan’s conditions:
In real life, our vehicle will obviously be operating on a larger scale and different conditions than Earth. Titan’s gravity is 1/7th as strong as Earth’s, and the atmosphere is around 50% more dense which reduces the energy consumption of the vehicle.
Thus, the formula for scaling to Titan’s conditions is:

= 1/10.5
With this, we can add the efficiency and get the final efficiency of the drone:

≈ 0.0001991 V/m (cor. to 7 d.p.)
With this, our values show us that the efficiency of the vehicle on Titan would be increased (9%) and the energy consumption will be reduced. Combined with our near-unlimited fuel sources, this goes to show that our design is well-prepared for Titan’s environment.
Conclusion
The tests we conducted on the vehicle showed that there was a difference in efficiency between no load and flying in a straight line and carrying load and flying in a zigzag pattern. In the NL Straight tests, the vehicle had an average voltage drop of 0.183 V and an efficiency of 0.000167 V/m. On the other hand, the L ZZ tests showed an average voltage drop of 0.23 V and an efficiency of 0.002091 V/m. These values show that the more realistic version would have a 92% decrease in efficiency and consume around 25% more power than a straight path. Also, our drone benefits greatly from the conditions of Titan which would further increase our efficiency by 90% and consume 10.5x less energy.
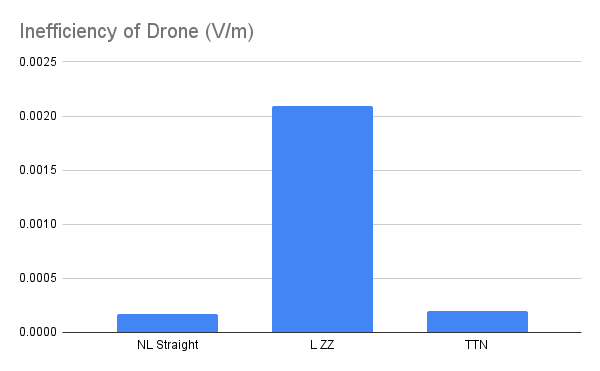
Data chart for the Inefficiency of the drone. Note how the L ZZ test was the most inefficient of all, around a 92% increase compared to NL Straight.
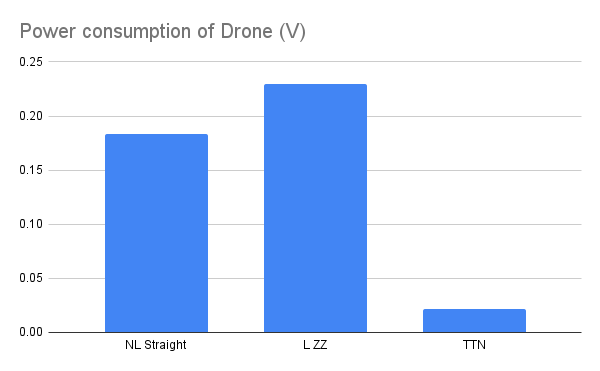
Data chart for the power consumption of the drone. Note the significant decrease of power of TTN compared to the other tests, around a 90% decrease compared to L ZZ.
The initial design was too idealistic. We had originally thought that we could use a 3D-printed frame for the drone with a windshield as an accessory, but it could not fit and we ultimately had to scrap the idea. We were also lacking in experience in soldering and circuitry, a big part of this project. We also did not foresee that the drone would catastrophically fail and reset our progress. These factors delayed our schedule and caused problems such as rushing and hasty repairs. I learnt to be more realistic and cut off or simplify parts of a project that I have less experience in as well as anticipate mistakes or failure.
Our group also did not communicate well or spread work evenly. Most of the work fell to our group leader, Joe, who is a sigma for doing most of the soldering and building. I had designed the original CAD model and helped Joe with some soldering and repairs, but I felt like we could have spread the work more evenly if we were working on the drone at the same time.
To wrap this up, I had a lot of fun building (and failing) the drone and learnt a lot of practical skills and gained experience on planning projects. Our proposed design for Titan would work well and be efficient.

Liftoff!
Aiden
3 Responses to “Voyage on Titan – Planet Exploration Project Pt. 3”
Good post, Aiden. You make some good observations about your test and have communicated some essential details. I have a couple of specific questions about your tests and one about the implications. First, you say that you did not land the drone between tests. Would this not explain why the first of each three tests has a much higher voltage drop? The lifting of the drone to cruising altitude would take more power and cover more distance, no? Also, how did you measure the horizontal distance covered? How do you know that the distance covered in the zig zag test was the same as that of the straight line test?
Early in you post you say that you will be “mathematically adjusting the results to account for Titan’s conditions, such as lower gravity and a denser atmosphere.” What does that look like? How do you think, mathematically, your real vehicle made of real materials, carrying a real payload would function on Titan? What might you have to change in the design?
Please reply in the comments below and resubmit the assignment. Thank you.
i explained the voltage drop under the data chart — it was because the drone had to fly up from ground for the 1st test whereas it only turned around in the air for the others. we did some adjustments for the zigzag test and included in our calculations.
we have already accounted for the 90% increase in efficiency for our real vehicle, which would be around 9000 times heavier and would likely be made of aluminum alloys. the main change would likely be the methane engine that would replace our electric motor, but the power outputs and efficiency would be relatively similar.
Yes, I get the fact that the initial lift consumed more power and thus affected your data. The unfortunate thing is that you have no idea exactly how much power is consumed in that lift. I’m not sure how how you got to 90% increase in efficiency given that there are significant changes to materials, components, and design that would have to occur which you haven’t done the math on. This seems like a good guess at best, but not a process of thoroughly mathematically adjusting the results. If there were a NASA situation, I’m sure that there would have to be a much more reliable process to get to where you would be comfortable risking the lives of astronauts. We will move on.